

Finite time sliding mode control system and method for bridge crane system under limited control input
A finite time and control method technology, applied in general control systems, control/regulation systems, adaptive control, etc., can solve the problem of weak robustness of sliding mode control, infinite time convergence, and solve the difficulty of implementation and the impact of implementation effects. It is difficult to obtain the expected effect and other problems, to achieve the effect of improving control robustness, strengthening connection, and weakening system chattering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be described in further detail below in conjunction with the accompanying drawings.
[0066] A kind of limited time sliding mode control method of bridge crane system provided by the present invention comprises the following steps:
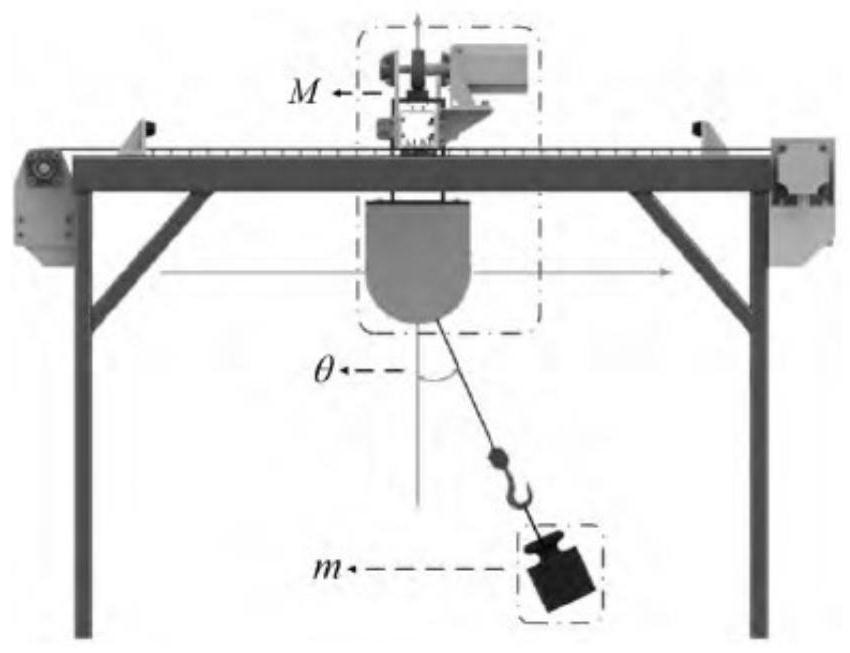
[0067] Step 1. Determine the control target of the bridge crane system, where the bridge crane system is two-dimensional underactuated, and the schematic diagram of the two-dimensional underactuated bridge crane system is as follows figure 1 shown;
[0068] The two-dimensional underactuated bridge crane system is represented by formula (1), and the system state error vector is defined e =[e 1 ,e 2 ,e 3 ,e 4 ] T ; e i =x i -x di ; x di For the control target, i=1,2,3,4:
[0069]
[0070] in, x =[x 1 ,x 2 ,x 3 ,x 4 ] T is the system state vector, respectively representing the trolley position, speed, load deflection angle and angular velocity; u(t) is the control input; Δ 1 ,Δ 2 is an uncertain...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More