

Vehicle driving blind area calibration method, device and equipment and storage medium
A vehicle driving and calibration method technology, applied in the field of vehicle navigation, can solve the problems of lack of validity of data, poor positioning accuracy, and high cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
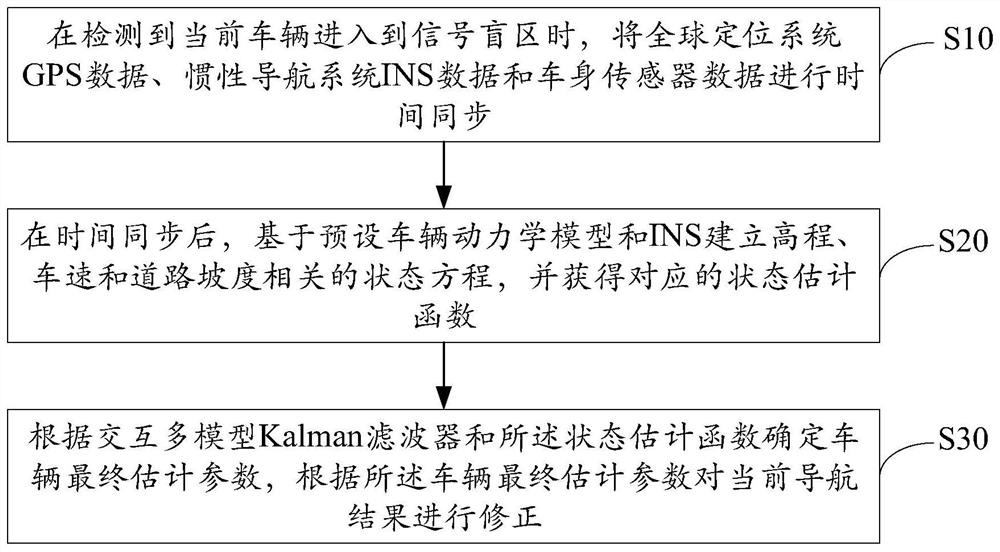
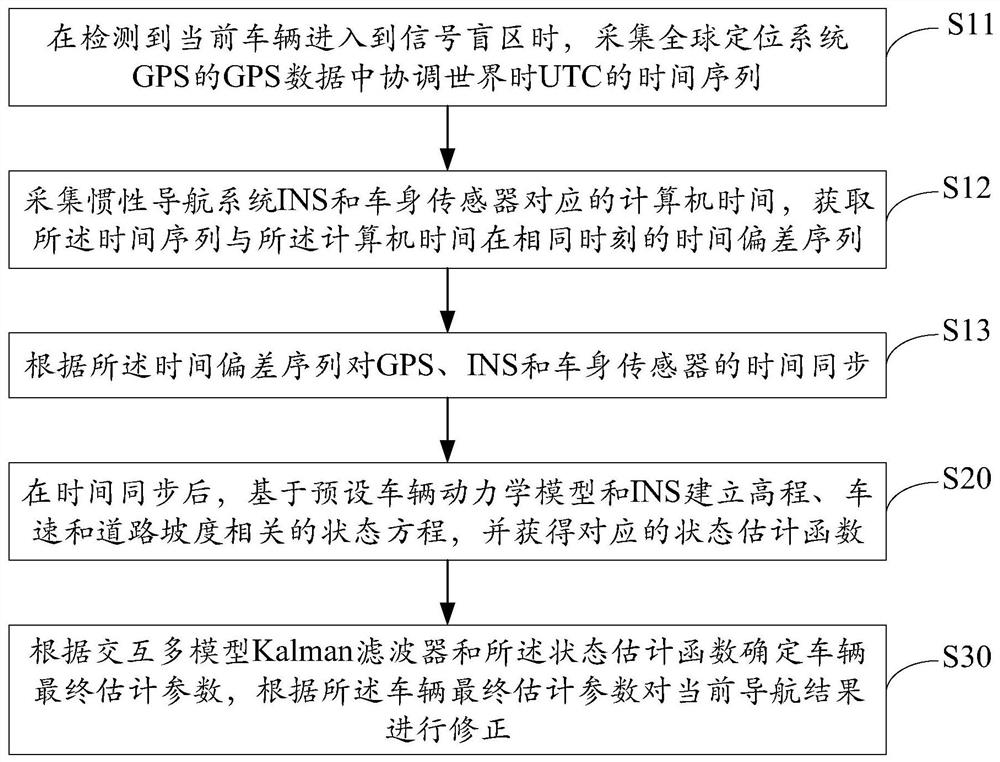
[0057] The solution of the embodiment of the present invention is mainly: when the current vehicle is detected to enter the signal blind zone, the GPS data of the global positioning system, the INS data of the inertial navigation system and the data of the vehicle body sensor are time-synchronized; The vehicle dynamics model and INS establish the state equations related to elevation, vehicle speed and road gradient, and obtain the corresponding state estimation function; determine the final estimation parameters of the vehicle according to the interactive multi-model Kalman filter and the state estimation function, and according to the final vehicle The estimated parameters correct the current navigation results, and the elevation signal can be corrected without being affected by the external environment, and the trans...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More