

Multi-robot cooperative 3D sound source identification and positioning method
A sound source identification and multi-robot technology, applied in the field of mobile robots, can solve problems such as reverberation interference, low microphone sampling frequency, and misidentification, and achieve strong anti-reverb ability, low search cost, and avoid inaccuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
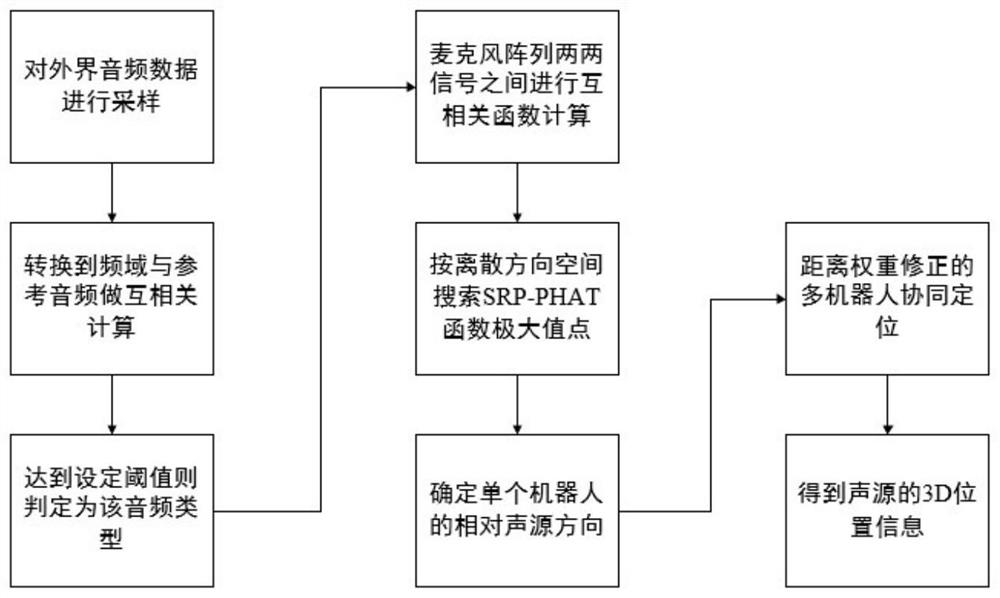
Method used
Image

Examples
Embodiment Construction
[0048] The idea, specific structure and technical effects of the present invention will be further described below in conjunction with the accompanying drawings, so as to fully understand the purpose, features and effects of the present invention.
[0049] In describing the present invention, it is to be understood that the terms "upper", "lower", "horizontal", "top", "bottom", "inner", "outer", "clockwise", "axial" , "radial", "circumferential" and other indicated orientations or positional relationships are based on the orientations or positional relationships shown in the drawings, which are only for the convenience of describing the present invention and simplifying the description, rather than indicating or implying the referred device or Elements must have certain orientations, be constructed and operate in certain orientations, and therefore should not be construed as limitations on the invention. In the description of the present invention, unless otherwise specified, "p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More