

Industrial robot battery clock method
An industrial robot and battery technology, applied in the direction of manipulators, manufacturing tools, etc., can solve problems affecting the production and processing of objects, potential safety hazards, loss of positions, etc., to avoid motor operation errors and ensure the effect of operation accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below in conjunction with the embodiments and accompanying drawings, and the contents mentioned in the implementation modes are not intended to limit the present invention.
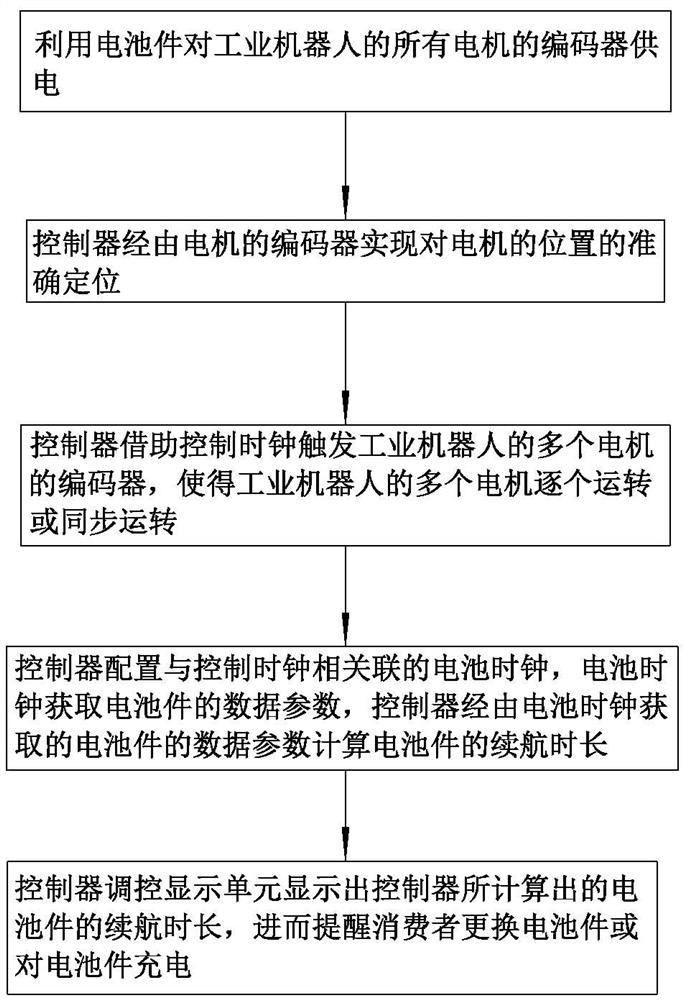
[0022] see figure 1 Shown, a kind of industrial robot battery clock method of the present invention comprises the steps:
[0023] Configure batteries, which are used to supply power to the encoders of multiple motors of industrial robots;
[0024] Equipped with a controller, the controller is electrically connected to the encoder of the motor, and the controller realizes the precise positioning of the position of the motor through the encoder of the motor; according to actual needs, the battery can be installed in the base of the industrial robot, or can be installed In the chassis of the control box, the protection of the battery is realized to prevent the battery from being damag...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More