

Unmanned aerial vehicle maneuvering target tracking method integrating Kalman filtering and DDQN algorithm
A Kalman filter and maneuvering target tracking technology, applied in the field of control, can solve the problems of no drone, unable to track maneuvering targets, and provide learning capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
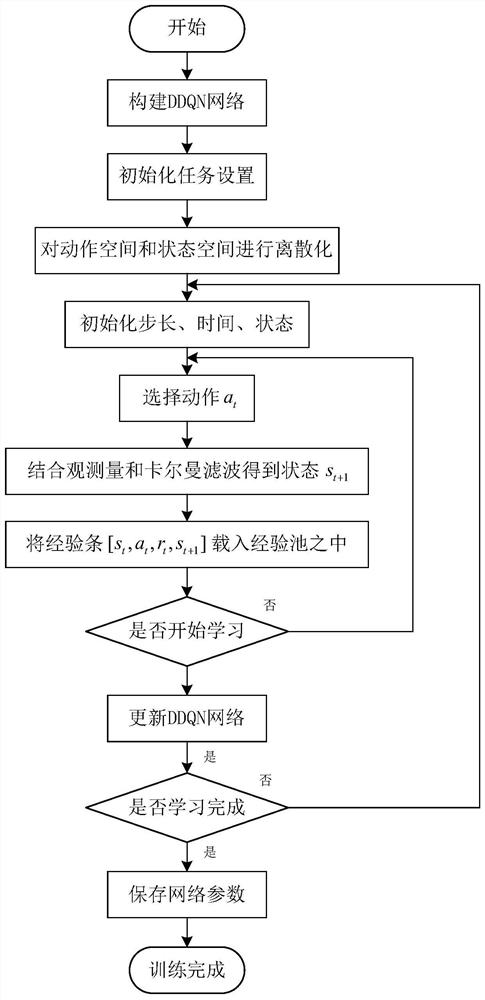
[0082] A UAV maneuvering target tracking method that combines Kalman filter and DDQN algorithm proposed by the present invention, the overall process is as follows figure 1 shown. Below in conjunction with accompanying drawing and specific embodiment, this technical solution is further clearly and completely described:
[0083] Step 1: Build a Markovian (MDP) model for UAV maneuvering target tracking
[0084] Step 1-1: Determine the state variables in the MDP model:
[0085] Use the inertial navigation system to fly the UAV at a fixed height, and set the state of the UAV in two-dimensional space:
[0086] S 1 =[x 1 ,y 1 ,v,θ]
[0087] where: x 1 ,y 1 Indicates the position coordinates of the UAV, v is the flight speed of the UAV, and θ is the flight yaw angle of the UAV;
[0088] According to the sensor information, set the target state:
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More