

Gait phase recognition method based on inertial sensor
An inertial sensor and recognition method technology, applied in the field of gait phase recognition, can solve problems such as poor robustness, prone to misjudgment and missed judgment, and difficult to define the threshold of threshold discrimination algorithms, so as to improve robustness and facilitate Fast on and off, improved ease of use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
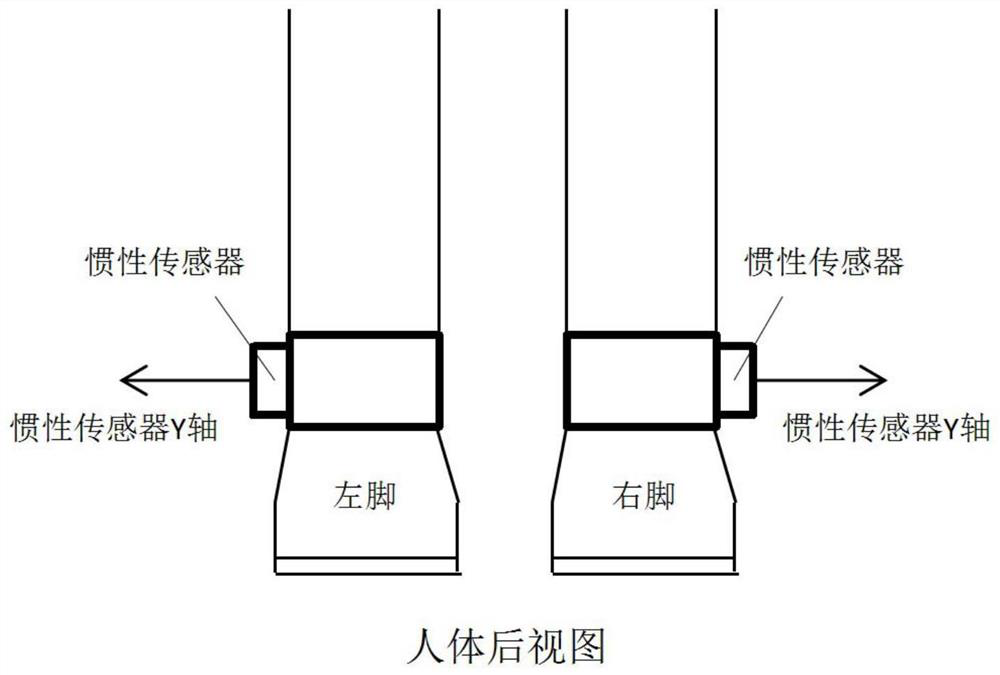
[0048] The invention discloses a gait phase identification method based on an inertial sensor, which utilizes the body side angular velocity collected by the inertial sensor bound at the ankle to perform extreme value discrimination. A complete gait cycle can be roughly divided into two phases, the swing state and the support state, and the support state can be divided into four stages in sequence: heel strike, full foot strike, heel off the ground, and forefoot off the ground. When in the stage of full-foot landing in the support state, the foot is relatively static relative to the ground, that is, the lateral angular velocity at the ankle is close to zero. Using the characteristic of angular velocity "touching the ground is zero", comparing the calibration results of pressure insoles, it can be seen that the entire supporting state ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More