Plant point cloud segmentation method and system based on two-dimensional-three-dimensional integration and storage medium
A technology of 3D point cloud and 3D integration, applied in neural learning methods, image analysis, image data processing, etc., can solve the problems of plant leaf occlusion and low segmentation accuracy, reduce manual intervention and improve measurement The effect of improving efficiency and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
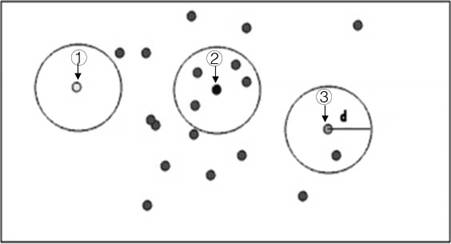
[0053] Such as figure 1 As shown, a plant point cloud segmentation method based on 2D-3D integration includes the following steps:
[0054] S1. Collect multiple images of plants at different angles;
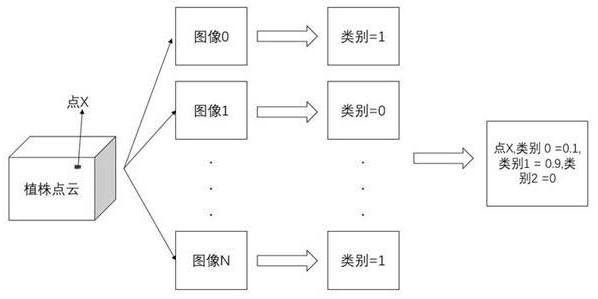
[0055]S2. Reconstructing the three-dimensional point cloud model of the plant through the motion restoration structure algorithm of the plurality of images, and simultaneously obtaining the mapping relationship between each image and the three-dimensional point cloud model;
[0056] S3. Preprocessing the point cloud data in the three-dimensional point cloud model obtained in step S2;
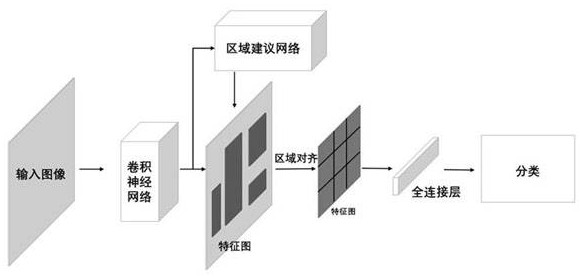
[0057] S4. Based on the mapping relationship between each image obtained in S2 and the three-dimensional point cloud model, the two-dimensional image segmentation result is obtained; meanwhile, based on the preprocessing data obtained in S3, the segmentation result based on the plant three-dimensional point cloud model is trained;
[0058] S5. Linearly weighted integration of the two-dimensional ...
Embodiment 2
[0094] The present invention further provides a plant point cloud segmentation system based on 2D-3D integration, which includes one or more processors; and also includes a storage device for storing one or more programs, wherein, when the one or more When the program is executed by the one or more processors, the one or more processors execute the plant point cloud segmentation method based on 2D-3D integration described in Embodiment 1.
Embodiment 3
[0096] The present invention also provides a computer-readable medium on which executable instructions are stored. When the instructions are executed by a processor, the processor executes the plant point cloud segmentation method based on 2D-3D integration described in Embodiment 1.
[0097] The same or similar reference numerals correspond to the same or similar components;
[0098] The terms describing the positional relationship in the drawings are only for illustrative purposes and cannot be interpreted as limitations on this patent;
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com