

Exoskeleton-oriented gait phase classification method based on TCN-HMM
A classification method and exoskeleton technology, applied in the direction of appliances that help people walk, biological neural network models, sensors, etc., can solve the problems of being easily disturbed, easy to wear, etc., and achieve high stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0046] In order to make the purpose, technical solution and main points of the present invention clearer, the following will further describe in detail the embodiments of the present invention in conjunction with the accompanying drawings.
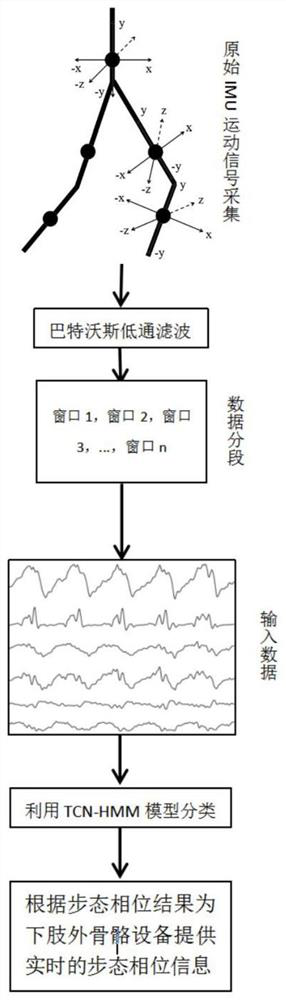
[0047] Such as figure 1 As shown, a TCN-HMM-based gait phase classification method for exoskeleton, including the following steps:
[0048] Step 1. IMU Data Acquisition
[0049] Fix five IMU sensors on the subject's waist, left thigh, left calf, right thigh, and right calf; the IMU sensor on the thigh is fixed about 6 cm above the knee joint on the side of the thigh, and the IMU sensor on the lower leg is Fix it at about 10cm above the ankle joint on the side of the calf. In order to facilitate labeling of IMU signals with different gait phases, the subjects were also asked to wear pressure shoes with plantar pressure sensors. The pressure shoes can detect the sole pressure and heel pressure; the subjects walk in a straight line at a sp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More