Control system, method, equipment for mechanical arm joint, and storage medium
A control system and control method technology, applied in the field of feedback control, can solve the problems of large mechanical resonance, error, difficulty in adapting to various working conditions, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
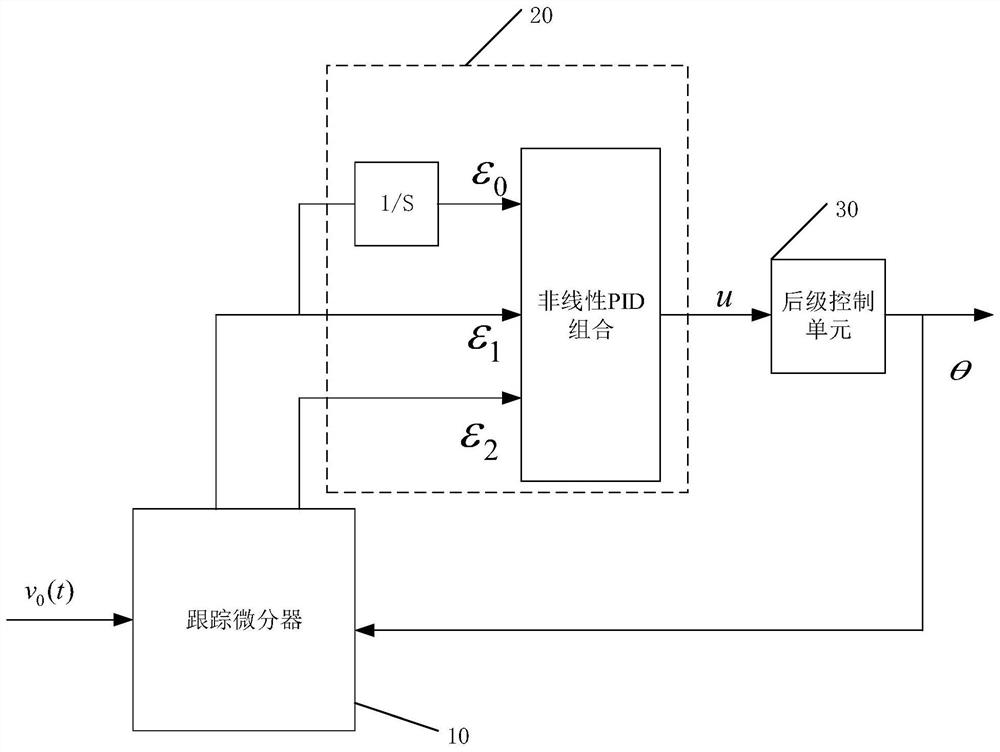
[0076] The core of the present invention is to provide a control system for the joints of the manipulator, which can make the differential link play a role, and at the same time, the noise amplification effect is very low, which can adapt to different working conditions and is also beneficial to suppress the jitter during the operation of the manipulator .
[0077] In order to enable those skilled in the art to better understand the solution of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. Apparently, the described embodiments are only some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0078] Please refer to figure 1 , figure 1 It is ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap