

Mechanical arm pose real-time detection method based on perspective multi-point projection
A technology of real-time detection and robotic arm, which is applied in image analysis, instruments, complex mathematical operations, etc. It can solve the problems of narrow field of view affected by light, high cost of binocular vision system, and poor system robustness, etc. , to achieve the effects of improving detection accuracy and efficiency, good recognition effect, and improving execution efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
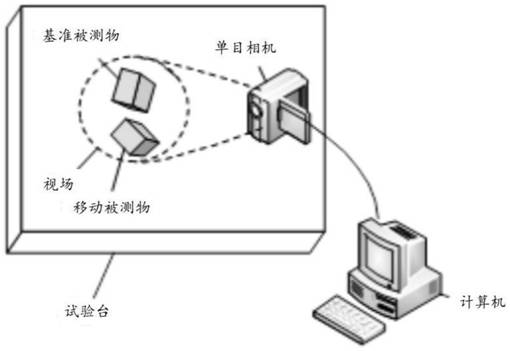
[0026] Since the direct control of the displacement operation of the mechanical arm cannot meet the precision requirements, the present invention uses two acrylic cubes to simplify the representation of the base of the mechanical arm and the coordinate system of the working end (the working end is the sixth joint of the six-degree-of-freedom mechanical arm), where A cube simulates the base of the robot arm and is fixed. The coordinate system it is in is called the base coordinate system. Another block simulates the sixth joint of the robotic arm, which can move freely, and its coordinate system is called the mobile coordinate system. The schematic diagram of the real-time detection system of the position and posture of the manipulator based on perspective multi-point projection is as follows: figure 1 As shown, the "moving object" and "reference object" used to represent the base of the manipulator and the tip of the operation are placed on the test platform, and the monocular...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More