

Coordination graph double-arm cooperative control method based on fusion of human body kinematics constraints
A collaborative control and kinematics technology, applied in the field of intelligent robots, can solve the problems of large amount of calculation, non-human-like operation, and low operation efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
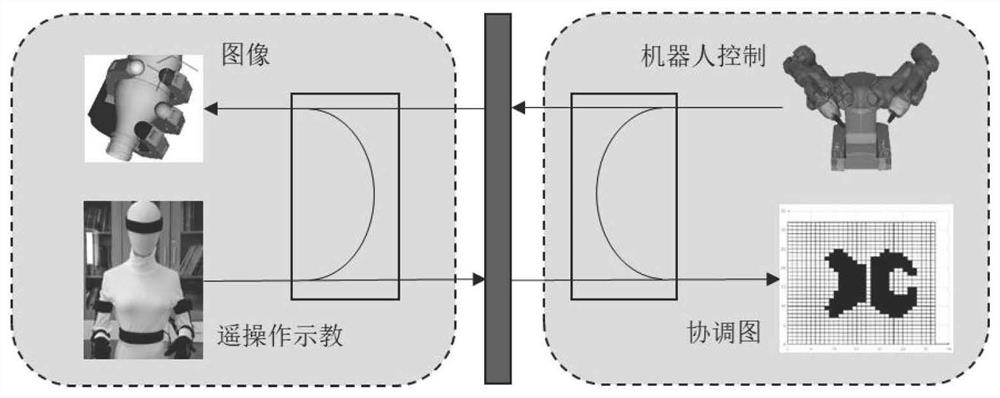
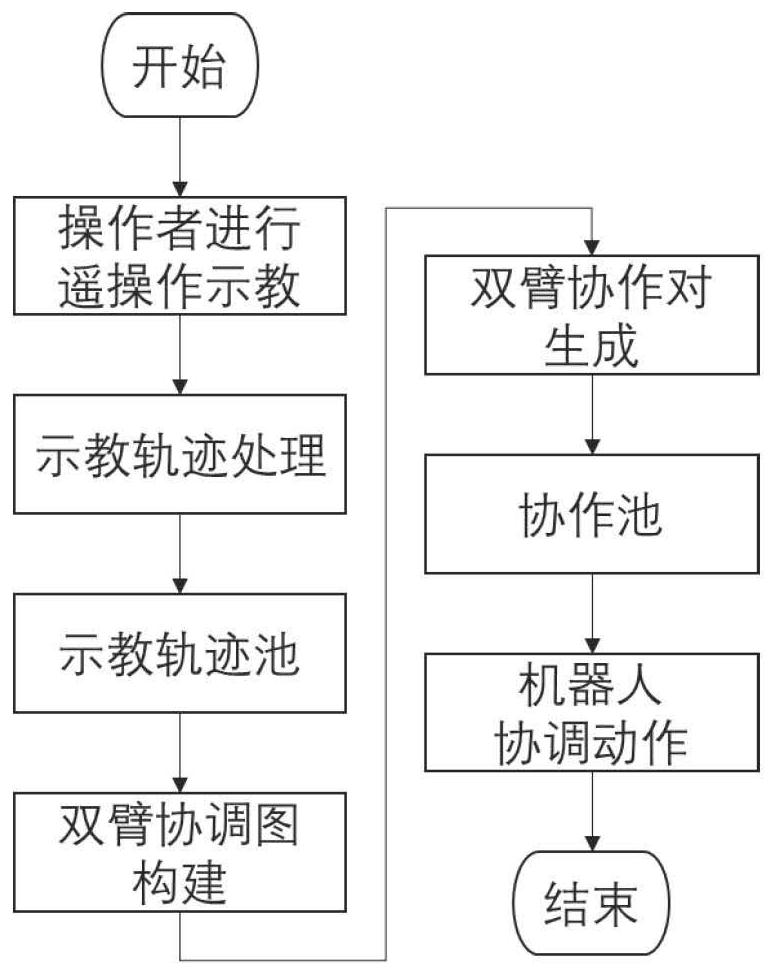
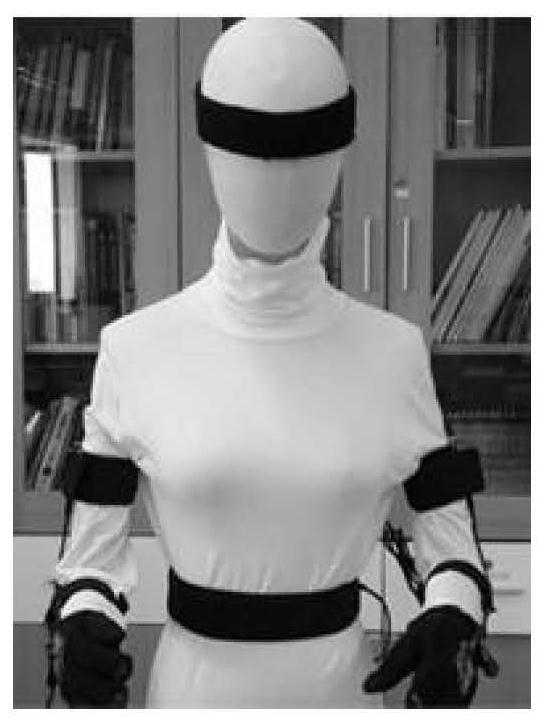
[0024] Below in conjunction with accompanying drawing, the inventive method will be further described, as figure 1 Shown is a schematic diagram of the method of the present invention, which adopts the idea of teleoperation teaching and integrates human kinematics constraints into the coordination diagram to carry out the dual-arm cooperative control of the humanoid robot. Method Workflow: Refer to figure 2 , the present invention is a coordination graph dual-arm cooperative control method based on fusion of human kinematic constraints, so that a humanoid dual-arm robot can complete dual-arm cooperative tasks efficiently without collision. The overall process of the method mainly includes: obtaining the teaching action part, the operator wears the human body posture acquisition suit to perform teleoperation action teaching, processes the trajectory of the teaching action, filters out repetitive and jittery data, and uses the grasping position Equal sampling is carried out f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More