Method for improving trueness of marine scene simulation picture
A technology of scene simulation and realism, applied in neural learning methods, image enhancement, image analysis, etc., can solve the problem of sample scarcity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
[0066] 1. Prepare the data set
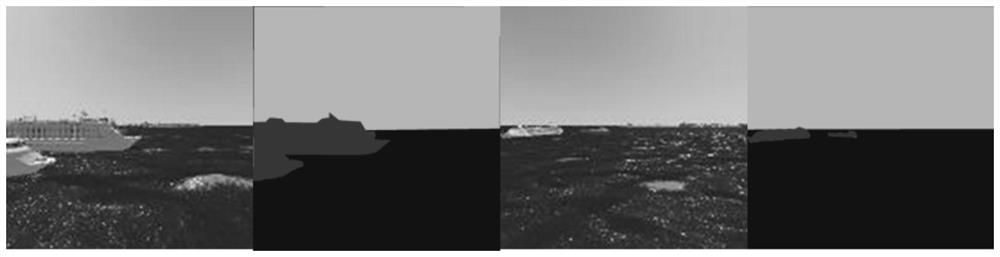
[0067] This method needs to prepare a total of three data sets, (1) the sea scene simulation picture data set Train_CG and its labels, which require the labels to divide the picture into three parts: the sky, the sea surface, and the foreground target. (2) Prepare the real sea scene photo dataset Train_real and its labels, and require the labels to divide the photos into foreground and background parts. (3) The sea surface photo dataset Train_sea without targets.
[0068] 2. Randomly select a sample image from Train_sea, and use the region growing algorithm to segment it.
[0069] 3. According to the semantic label of Train_CG and the segmentation result of Train_sea, it detects the sea antenna.
[0070] Randomly select a picture from each of Train_CG and Train_sea, and perform multiple samplings on the contact points between the sea surface and the sky in the two segmentation pictures to obtain a set of sampling point samples, and remove the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com