

Unmanned aerial vehicle integrated navigation method and system based on unscented Kalman filtering
A technology of unscented Kalman and integrated navigation, applied in radio wave measurement system, satellite radio beacon positioning system, navigation and other directions, can solve the problem of loss of accuracy and achieve the effect of reducing requirements, reducing calculation amount and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0218] The invention does not need to linearize the state equation, and the calculation amount is less than that of the EKF combined navigation algorithm with the same state variable. A typical embodiment will be described below in combination with the aforementioned steps.
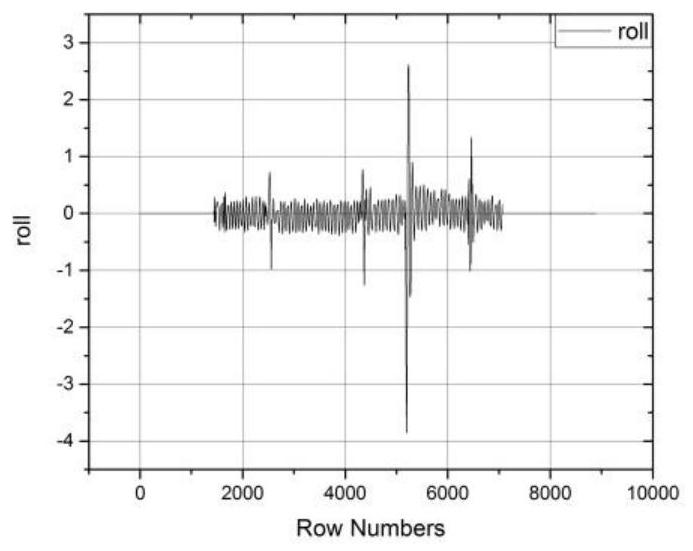
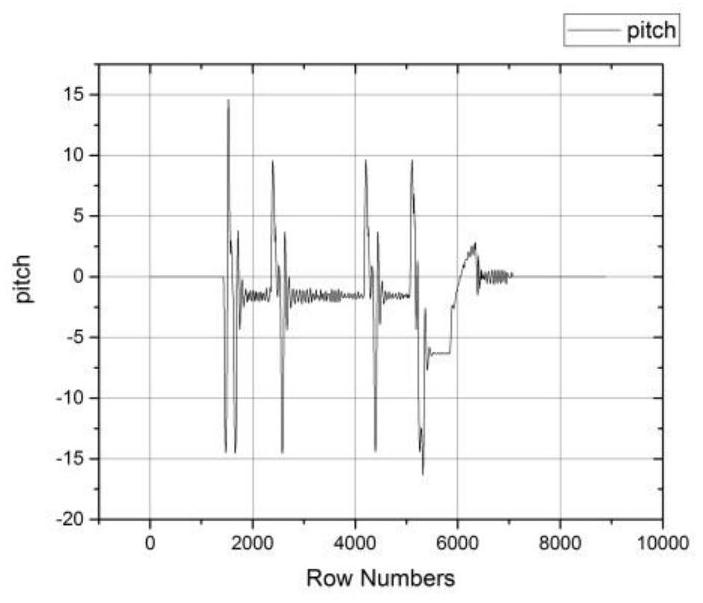
[0219] The initial attitude of the UAV (roll angle roll and pitch angle pitch) can be calculated by the static adder value:
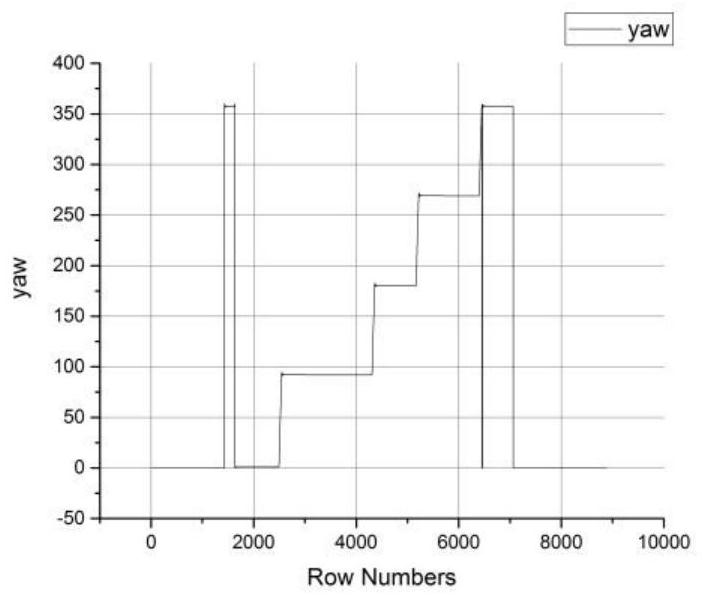
[0220] The initial heading angle of the UAV can be calculated by the magnetometer:
[0221] Then the four elements of UAV attitude can be determined through the initial attitude
[0222] [q 0 q 1 q 2 q 3 ]=[1 0 0 0]
[0223] The initial speed of the UAV can be obtained through GNSS:
[0224] [v x v y v z ]=[0 0 0]
[0225] The initial position of the UAV can be obtained through GNSS:
[0226] [p x p y p z ]=[0 0 0]
[0227] The zero bias of the UAV gyroscope and accelerometer can be set to zero:
[0228]
[0229] So we can get the initial state x of the i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More