

A composite control method to improve the anti-disturbance capability of brushless DC motor
A brushed DC motor and compound control technology, which is applied in the direction of AC motor control, single motor speed/torque control, motor parameter estimation/correction, etc., can solve the problem of motor performance affected by load uncertainty and complex mechanical structure of the motor performance, reduce the problems of full state feedback control, etc., achieve good tracking performance, strong real-time control, and achieve simple effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0116] The present invention will be further described in detail below with reference to the accompanying drawings and specific embodiments.
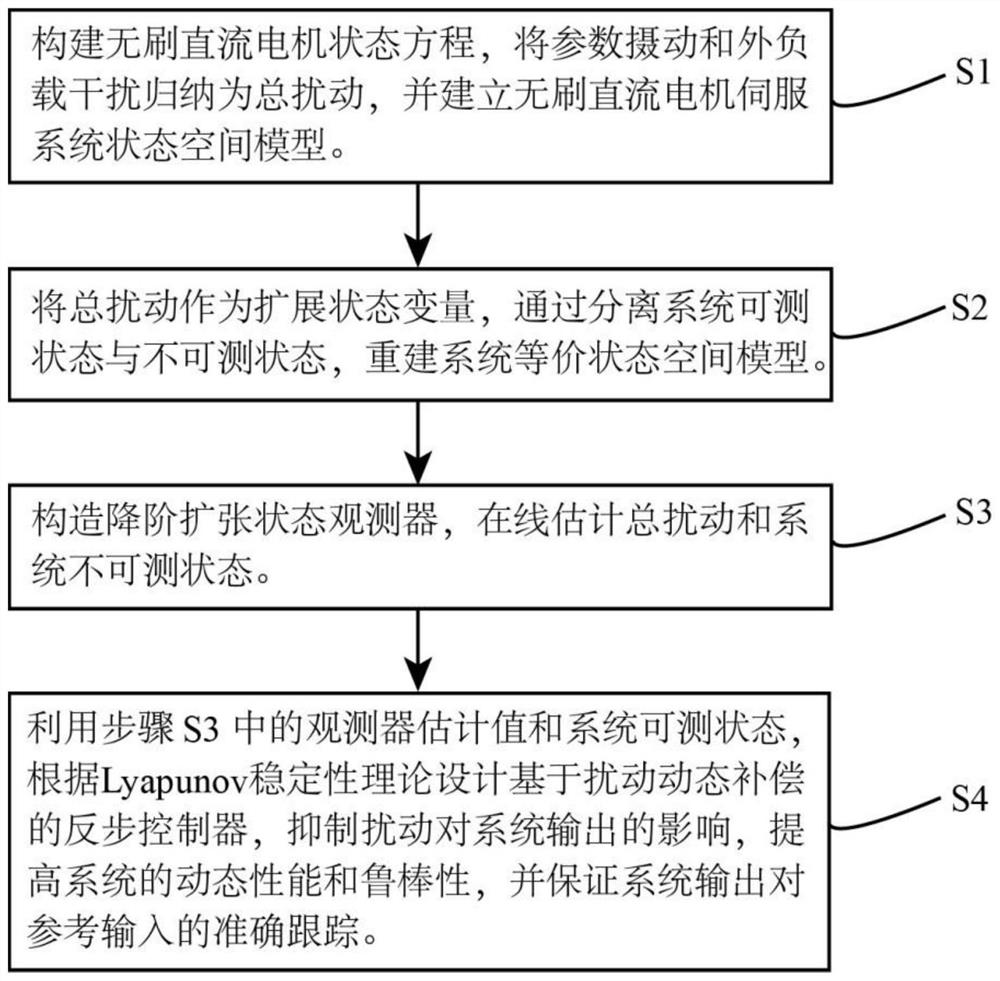
[0117] like figure 1 and Figure 10 As shown, a composite control method for improving the anti-disturbance capability of a brushless DC motor of the present invention includes the following steps:
[0118] Step S1: constructing a state equation of the brushless DC motor, summarizing the parameter perturbation and external load disturbance into a total disturbance, and establishing a state space model of the brushless DC motor servo system;
[0119] Step S2: taking the total disturbance as an extended state variable, and reconstructing an equivalent state space model of the system by separating the measurable state and the unmeasurable state of the system;
[0120] Step S3: construct a reduced-order extended state observer, and estimate the total disturbance and the unmeasurable state of the system online;
[0121] Step S4: Using the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More