

Multi-sensing information fusion system for path planning robot and control method of multi-sensing information fusion system
A path planning and robot technology, applied in two-dimensional position/course control, vehicle position/route/height control, position/direction control, etc., can solve information fusion deviation, data inconsistency, and affect the response of multi-sensor information fusion system Speed and other issues, to achieve the effect of accurate running track and alleviate the reduction of data response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] like figure 1 As shown, in this embodiment, a multi-sensing information fusion system for path planning robot, including:
[0046]A multi-sensor information fusion system for path planning robot, characterized in that it includes
[0047] Data layer information fusion module for statistical analysis of multi-sensor raw observation data;
[0048] A feature layer information fusion module that combines the feature vectors extracted from the original data;
[0049] A decision-making level information fusion module that performs independent data processing on the same observation target.
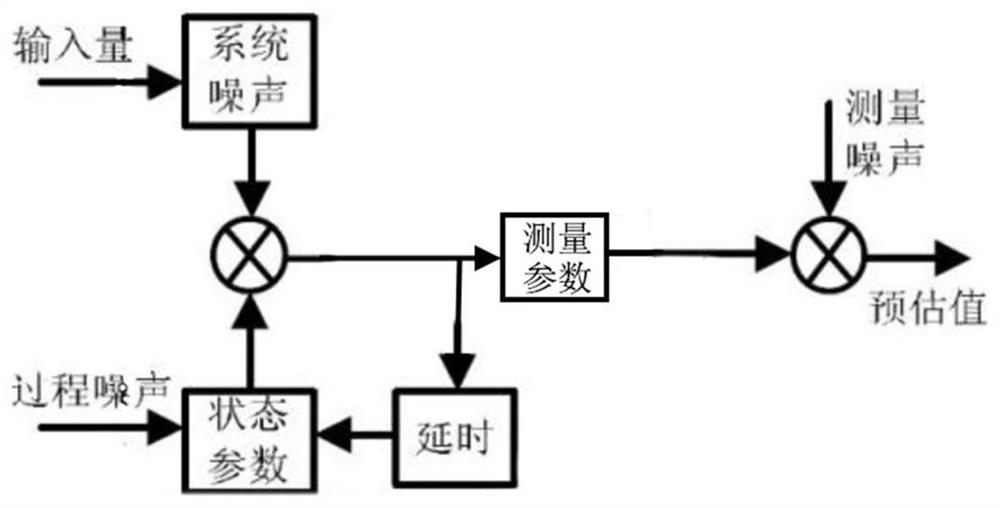
[0050] In a further embodiment, the data layer information fusion performs statistical analysis on the original observation data of multiple sensors, completes the preservation of the original data and the correlation between the original data, and makes the measurement results accurate. Through the data layer information fusion operation and Kalman filtering adjusts the original data;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More