

Agricultural robot motion control method and system
A technology of robot motion and control method, applied in the field of control, can solve the problems of slow steering movement speed, poor flexible running trajectory, difficult movement trajectory control, etc., and achieve the effect of improving the running trajectory
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment (2)
[0063] Embodiment (2) System
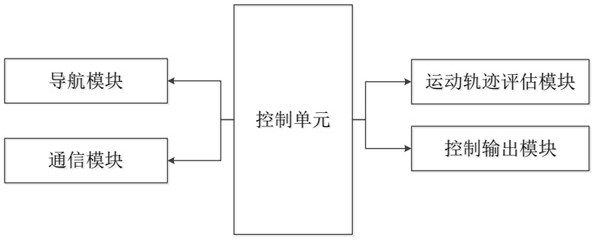
[0064] An agricultural robot motion control system, comprising:
[0065] The control unit is used to control the motion state of the robot;
[0066] Navigation module, used to guide or control the trajectory of the robot;
[0067] The communication module is used to transmit the data information of the robot movement to the remote data center;
[0068] The motion trajectory evaluation module is used to evaluate the motion of the robot during the motion process;
[0069] The control output module is used to receive or send the command of the robot motion;
[0070] The control unit is respectively connected with the navigation module, the communication module, the motion trajectory evaluation module and the control output module.
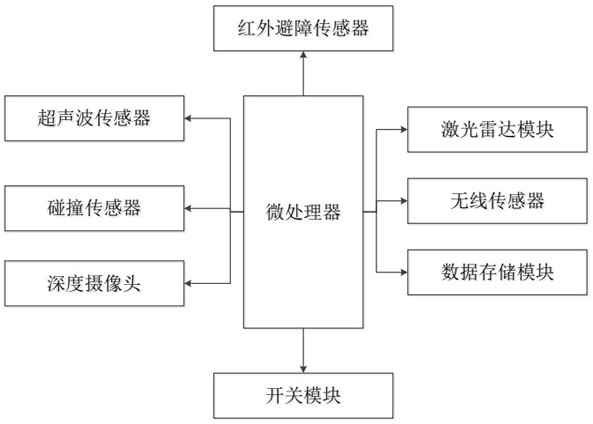
[0071] In the above embodiment, the control unit includes an FPGA chip, and the FPGA chip is a control module of the EP4CE6F17C8 model.
[0072] In a specific embodiment, the FPGA chip is used as the core control ch...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More