

A Balanced Self-Stable Space Motion Positioning System
A space motion and positioning system technology, applied in general control systems, control/regulation systems, program control, etc., can solve problems such as narrow application area, large noise of inertial measurement units, loss of flexible motion, etc. Low consumption and stable work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
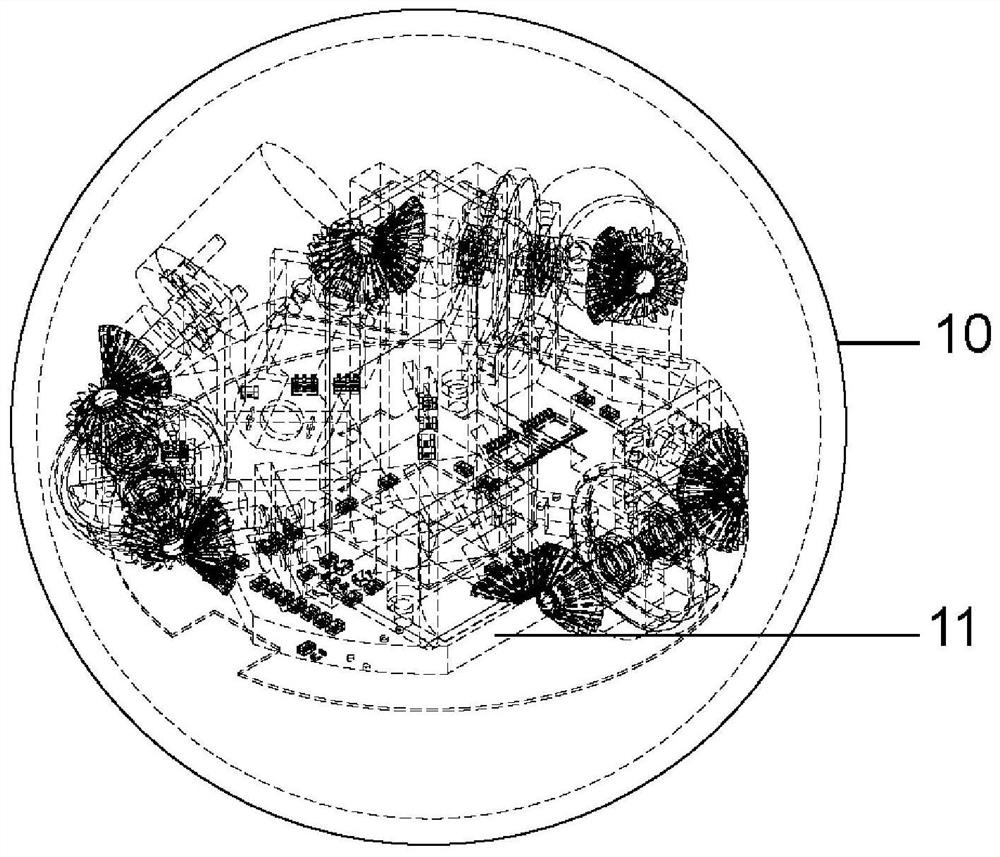
[0019] Such as figure 1 It is a perspective view of the overall structure of the balanced self-stabilizing space motion positioning system of the present invention. The space motion positioning system includes a spherical shell 10, an equilibrium state self-stabilizing mechanism 11, a balance platform, an integrated circuit board 9 and a power supply, and the equilibrium state self-stabilizing The mechanism 11 is arranged inside the spherical shell 10 and is fixedly connected with the balance platform 4 , the balance platform is fixedly connected with the integrated circuit board 9 , and the power supply is connected with the integrated circuit board 9 .
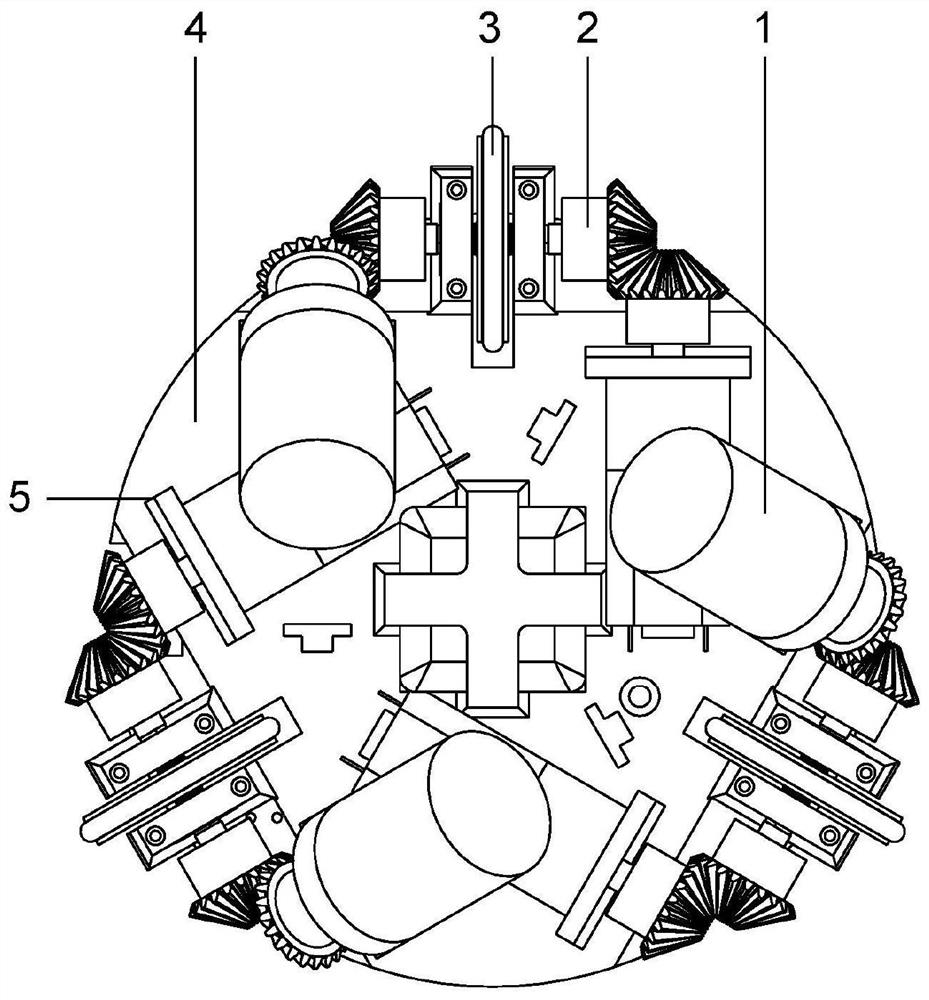
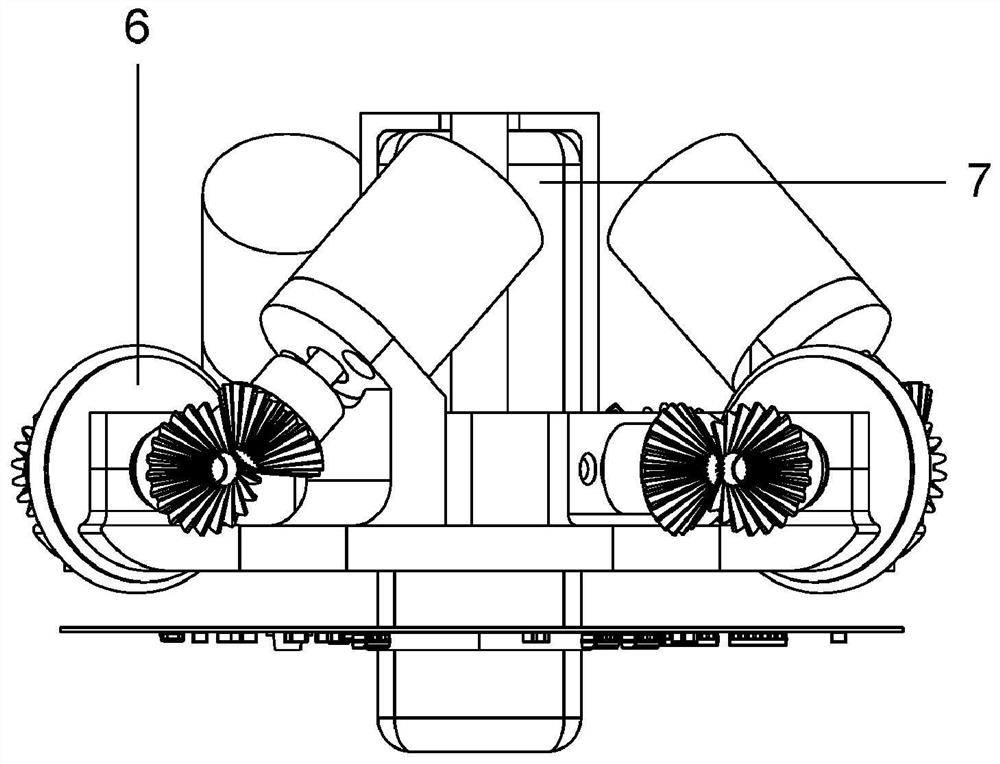
[0020] Such as Figure 2-4 It is a structural diagram of the internal equilibrium state self-stabilizing mechanism of the space motion positioning system of the present invention. The equilibrium state self-stabilizing mechanism 11 has three groups of driving and detecting units, and the three groups of driving and detecting...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More