

Warehouse logistics AGV path planning algorithm based on ant colony algorithm and improved genetic algorithm
A genetic algorithm and ant colony algorithm technology, applied in the field of automated logistics and warehousing, can solve problems such as unsatisfactory path planning, parameter setting depends on experience, and easy to fall into local optimum, so as to save computing time, maintain population diversity, improve Effects of Precocious Convergence Defects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
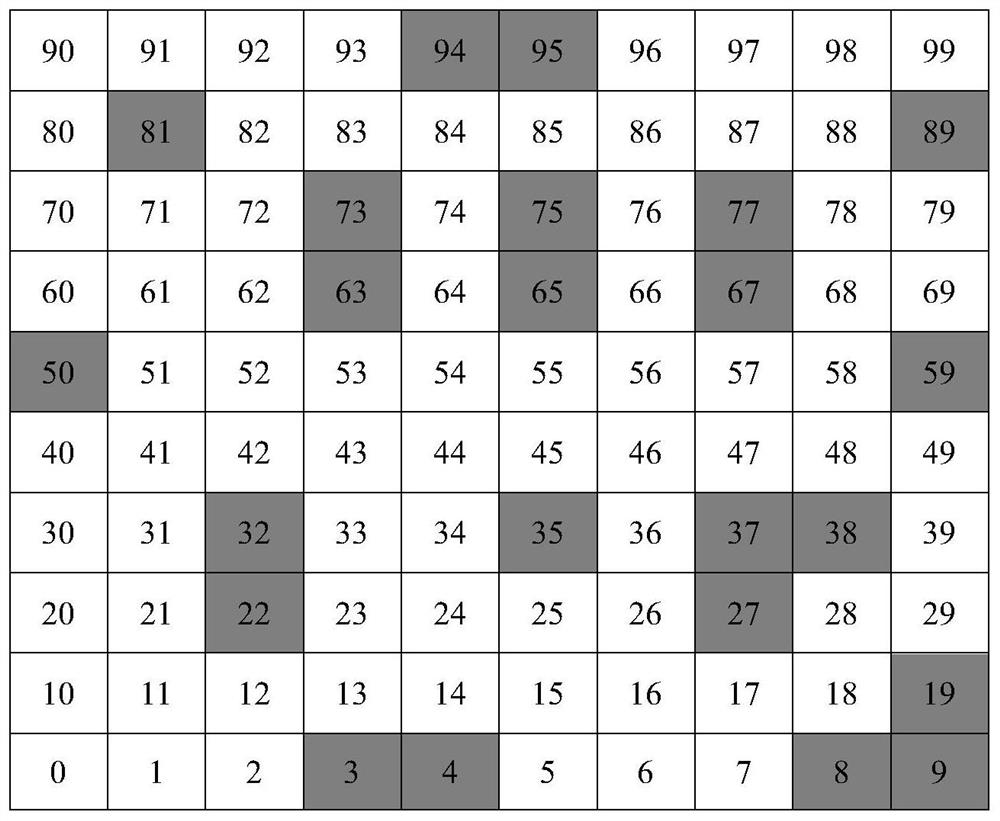
[0101] The specific implementation manner of the present invention will now be described in conjunction with the accompanying drawings and examples.
[0102] The application scenario of this experiment example is a logistics warehouse. The warehouse site includes delivery platforms, stackers, dozens of AGVs, and shelves. At the same time, some infrastructure in the factory may become obstacles on the path of the AGV. The proposed algorithm is programmed After debugging, upload the executable file to the industrial control server equipped with a complete master control reset instruction runtime library and carry out algorithm operation according to the task input collected by the management and control system, and decentralize the operation results through the preset compatibility interface with the warehouse management system To the AGV, complete the corresponding pick-up and delivery actions.
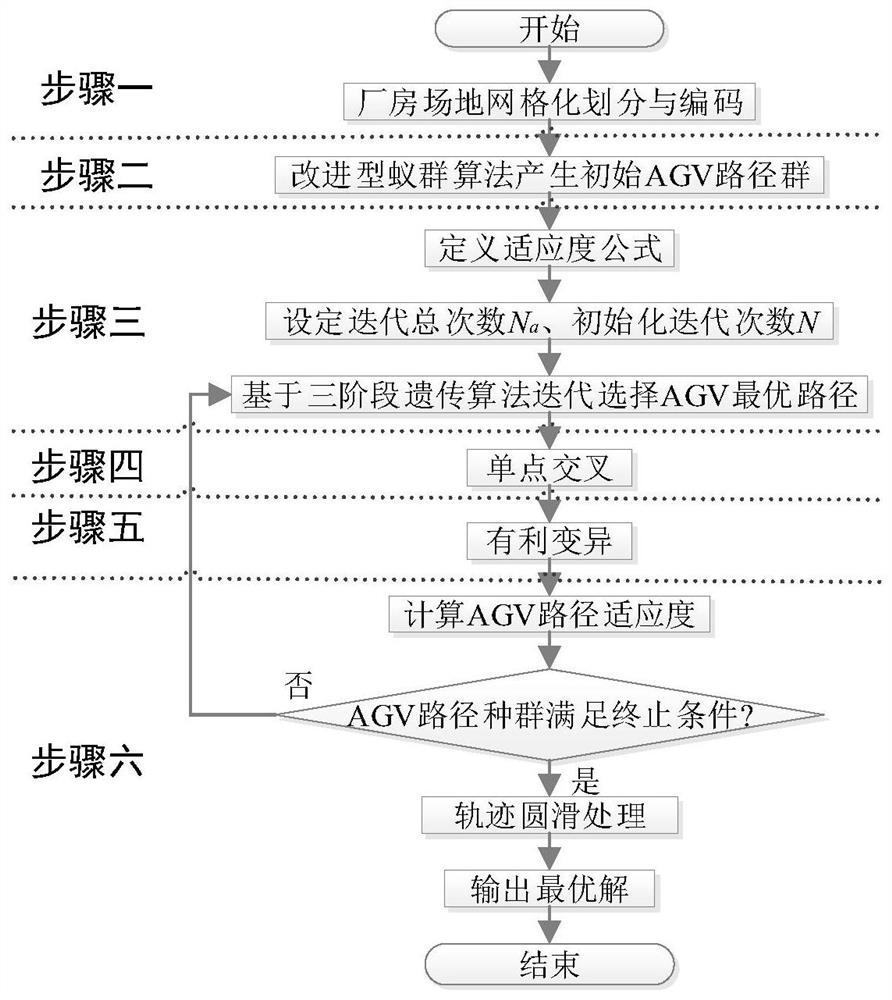
[0103] like figure 1 The ant colony algorithm-genetic algorithm hybrid path plann...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More