

Method for achieving positioning by using wheel type odometer-IMU and monocular camera
An -IMU, odometer technology, applied in the field of computer vision, can solve the problems of inertial measurement unit unable to detect acceleration, scale uncertainty increases, positioning error increases, etc., to achieve low cost, solve scale uncertainty, accurate high sex effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] Embodiments of the present invention are described below through specific examples. It should be noted that the diagrams provided in this embodiment only illustrate the basic idea of the present invention in a schematic manner, so only the relevant aspects of the present invention are shown in the drawings. The components are not drawn according to the number, shape and size of the components in actual implementation. The type, quantity and proportion of each component in actual implementation can be changed arbitrarily, and the layout of the components may also be more complicated.
[0080] The present invention will be described in detail below in conjunction with the embodiments and the accompanying drawings.
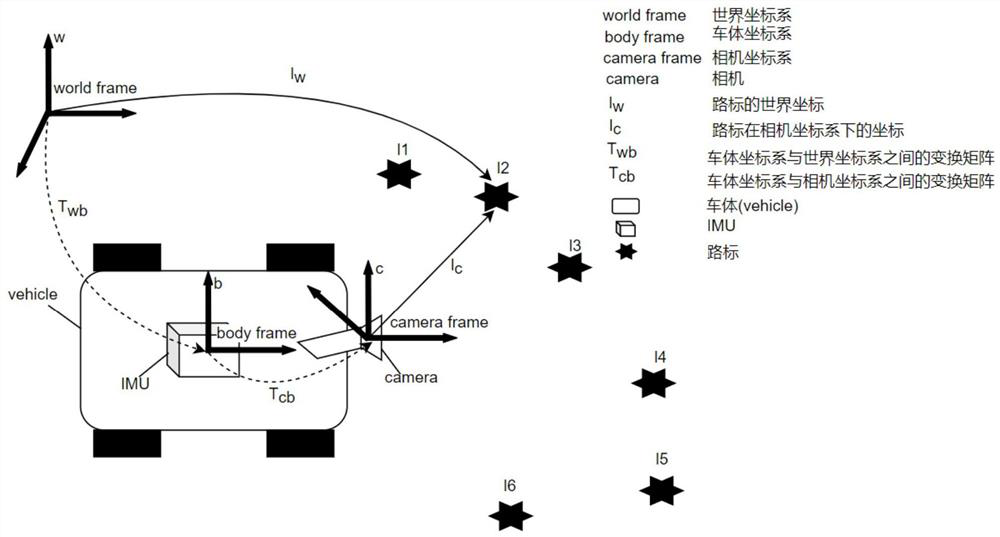
[0081] A system that uses a wheel odometer-IMU and a monocular camera to realize a positioning method, including a front-end VO module, a back-end image optimization module, and a loop detection module. The front-end VO module is used to predict the prelimin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More