

Automatic registration method for laser point cloud and sequence panoramic image
A panoramic image and laser point cloud technology, applied in image enhancement, image analysis, combustion engine, etc., can solve problems such as inaccurate geometric positioning and weakening model dependence on high-precision POS data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] The technical solutions of the present invention will be described below in conjunction with the accompanying drawings and embodiments.
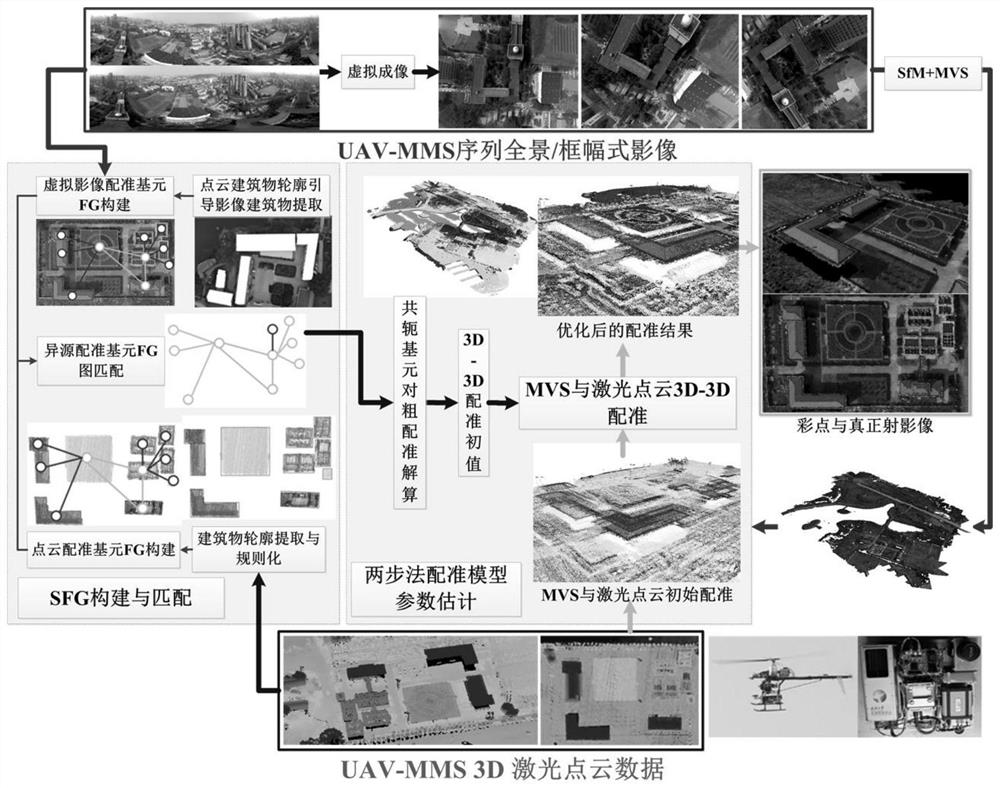
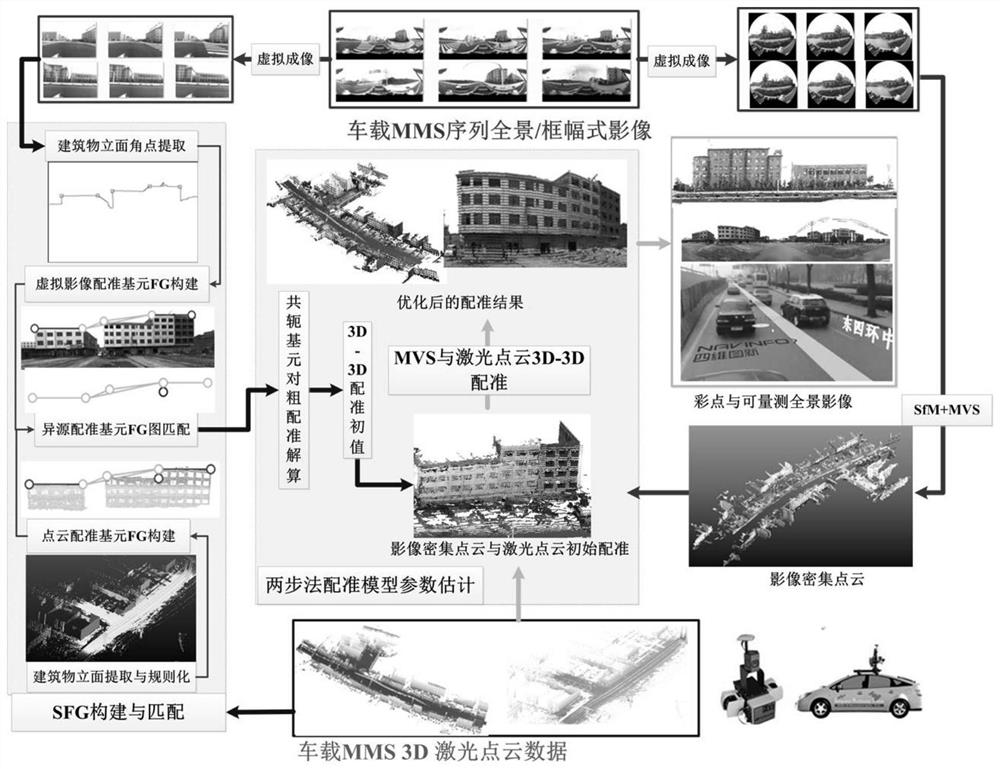
[0068] Select the point cloud data and sequence panoramic images obtained by the low-altitude UAV multi-sensor acquisition system Heli-Mapper developed by the State Key Laboratory of Surveying, Mapping and Remote Sensing Information Engineering of Wuhan University, and the point cloud data and sequence panoramic images obtained by various vehicle-mounted mobile measurement systems , the SFGM registration model proposed by the present invention is described in detail on the unmanned aerial vehicle and the vehicle-mounted mobile measurement platform. see figure 1 and figure 2 , the embodiment of the present invention includes the following steps:
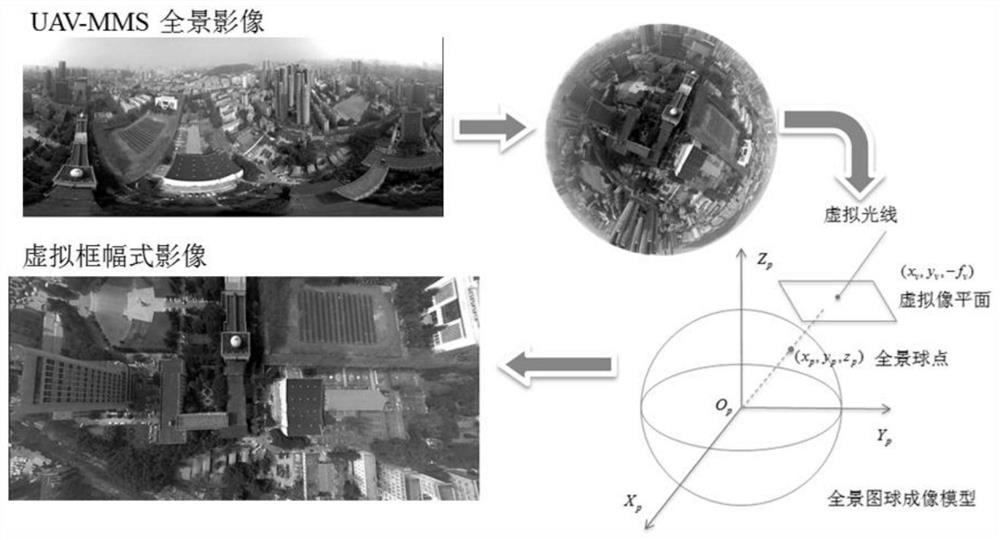
[0069] Step 1, sequence panoramic image preprocessing. Using the automatic recovery method of panoramic image structure features, the sequential panoramic images obtained from UAV MMS and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More