

Profiling robot system based on pneumatic muscles
A robot system and pneumatic muscle technology, applied in the direction of manipulators, program-controlled manipulators, joints, etc., can solve the problems that can not reflect the movement characteristics of human joints and muscles more realistically
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
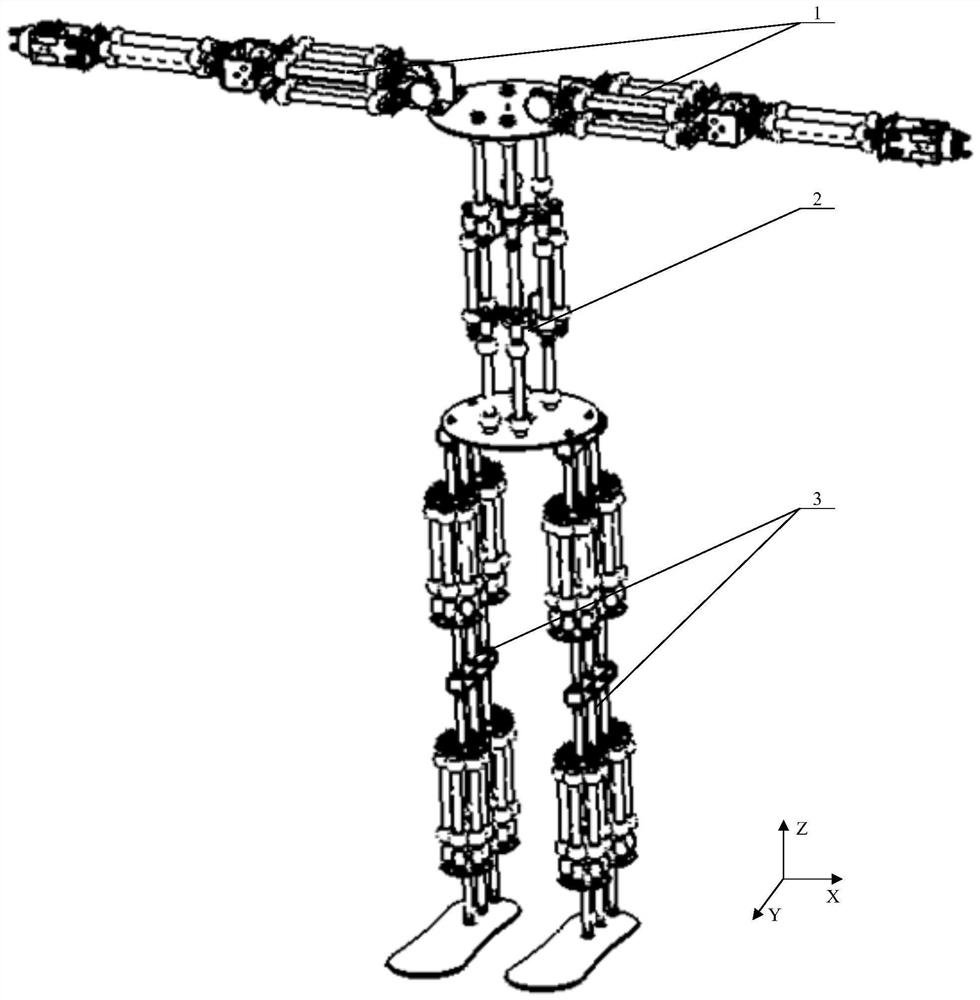
[0042] A profiling robot system based on pneumatic muscles, comprising: a waist joint 2, upper limb joints 1 that are mirror images of each other are arranged on both sides of the waist joint 2, and lower limb joints 3 that are mirror images of each other are arranged on the lower part;
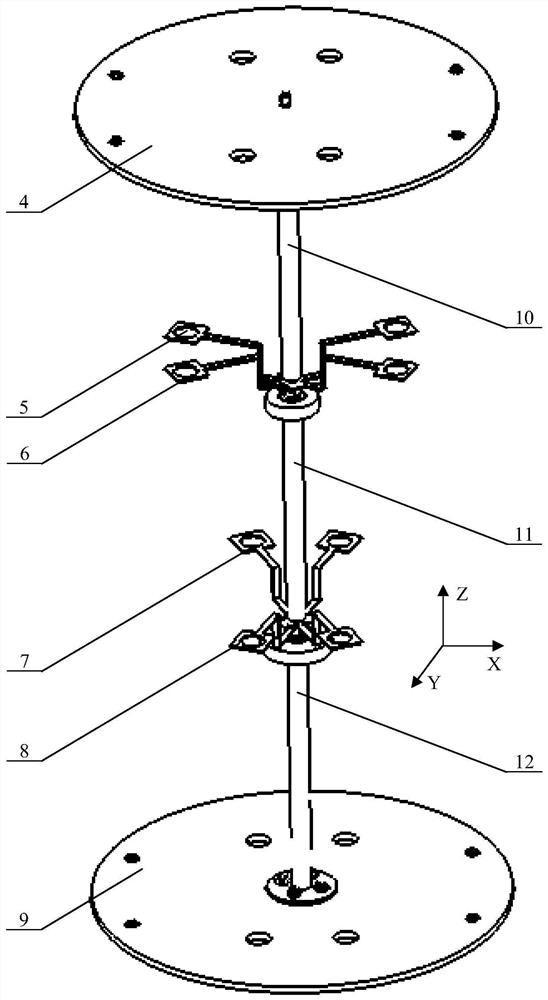
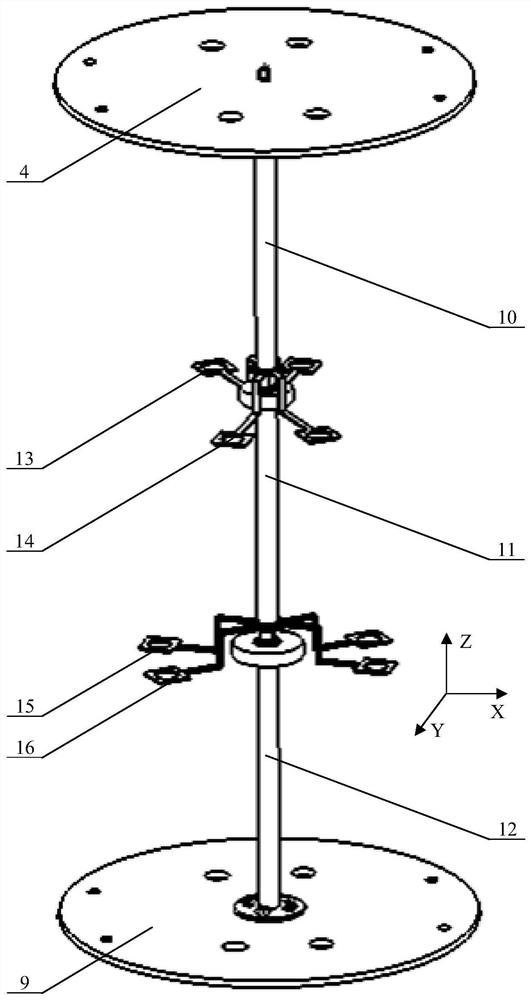
[0043] The lumbar joint upper side plate 4 of the lumbar joint 2, the middle pillar one 10, the middle pillar two 11, and the middle pillar three 12 are rotatably connected in sequence, the middle pillar three 12 is fixedly connected with the waist joint lower side plate 9, the middle pillar one 10, the middle pillar Pneumatic muscle connector one 5, pneumatic muscle connector two 6, pneumatic muscle connector five 13, pneumatic muscle connector six 14 are arranged between pillar two 11, described pneumatic muscle connector one 5, pneumatic muscle connector two...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More