

A self-driving car control system
A technology for autonomous driving and vehicle control, applied in general control systems, control/regulation systems, program control, etc., can solve the problems of multi-sensor data not being well integrated, multi-sensor independence not being well unified, etc., to ensure sports safety. performance, and the effect of improving operation speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
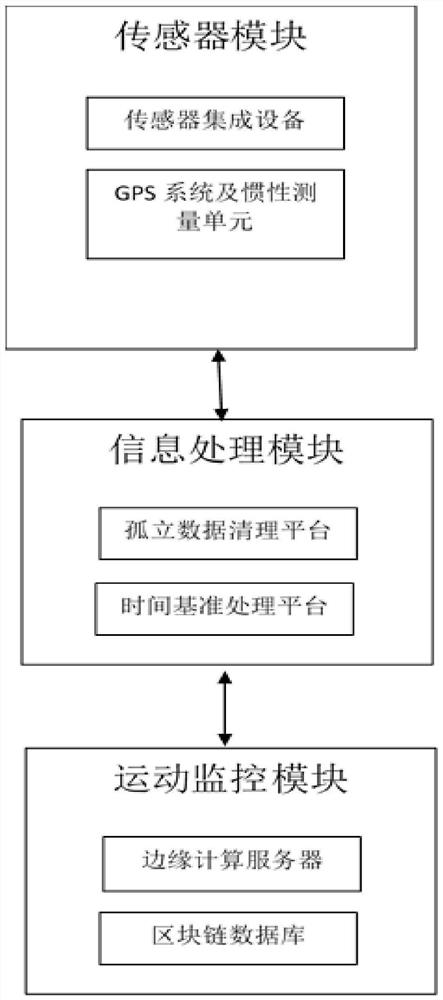
[0032] In the first embodiment, the system includes: a sensor module, an information processing module, and a motion monitoring module; the sensor module and the information processing module are connected in data, and the information processing module and the motion monitoring module have data connect;
[0033] The sensor module is composed of vehicle-mounted sensor integrated equipment, GPS system, inertial measurement unit and gateway, wherein the vehicle-mounted sensor integrated equipment includes vehicle-mounted radar, vehicle-mounted binocular camera and position sensor, and the gateway is responsible for receiving data from the drive-test sensor equipment. The real-time road data transmitted; wherein the GPS system and the inertial measurement unit constitute a navigation unit. When the vehicle enters a no-signal area, the GPS system stops running and the inertial measurement unit starts to measure the trajectory of the vehicle, and the inertial measurement unit It is ...
Embodiment 2
[0039] Embodiment 2: This embodiment should be understood as including at least all the features of any one of the foregoing embodiments, and further improvements on the basis thereof. Specifically,
[0040] The system includes: a sensor module, an information processing module and a motion monitoring module; the sensor module and the information processing module are data connected, and the information processing module and the motion monitoring module are data connected;
[0041]The sensor module is composed of vehicle-mounted sensor integrated equipment, GPS system, inertial measurement unit and gateway, wherein the vehicle-mounted sensor integrated equipment includes vehicle-mounted radar, vehicle-mounted binocular camera and position sensor, and the gateway is responsible for receiving data from the drive-test sensor equipment. The real-time road data transmitted; wherein the GPS system and the inertial measurement unit constitute a navigation unit. When the vehicle enters...
Embodiment 3
[0055] Embodiment 3: This embodiment should be understood as including at least all the features of any one of the foregoing embodiments, and further improvements on the basis thereof. Specifically,
[0056] The system includes: a sensor module, an information processing module and a motion monitoring module; the sensor module and the information processing module are data connected, and the information processing module and the motion monitoring module are data connected;
[0057] The sensor module is composed of vehicle-mounted sensor integrated equipment, GPS system, inertial measurement unit and gateway, wherein the vehicle-mounted sensor integrated equipment includes vehicle-mounted radar, vehicle-mounted binocular camera and position sensor, and the gateway is responsible for receiving data from the drive-test sensor equipment. The real-time road data transmitted; wherein the GPS system and the inertial measurement unit constitute a navigation unit. When the vehicle enter...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More