A continuum robot for narrow cavity surgery
A continuum and robot technology, applied in the field of medical devices, can solve the problems of limited reachable space of robots, low surgical operation accuracy, poor movement flexibility, etc., and achieve the effects of more degrees of freedom, small surgical wounds, and large effective working space.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
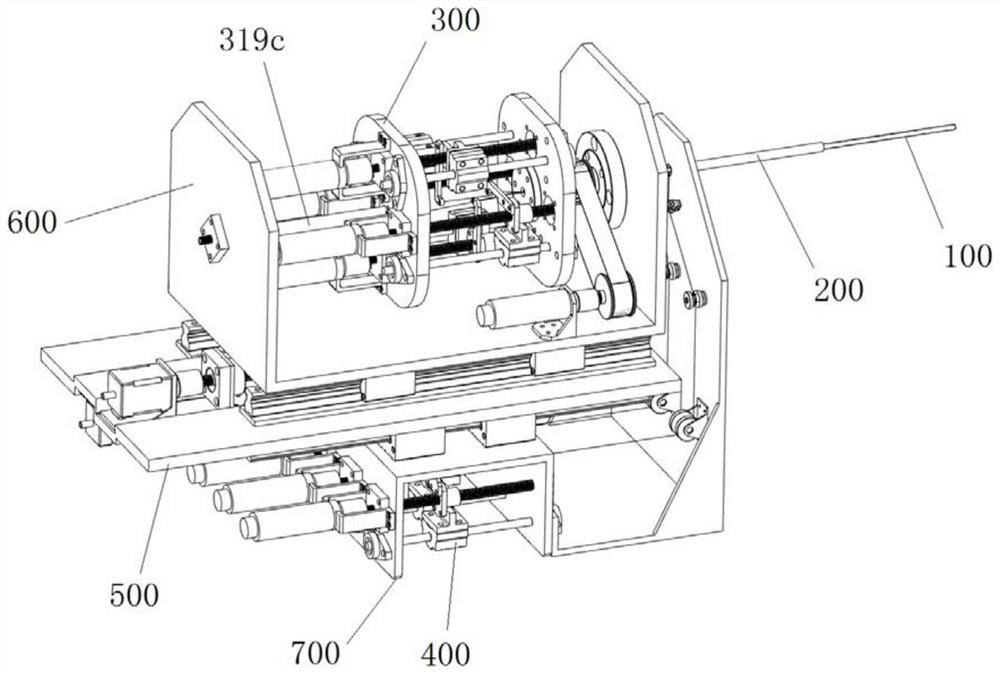
[0047] This embodiment provides a continuum robot for narrow lumen surgery, such as figure 1 -9, including the inner arm 100, the outer arm 200, the inner arm driving device 300, the outer arm driving device 400, the fixing seat 500, the inner arm support plate 600 and the outer arm support plate 700.
[0048] see figure 1 , 8 -9. Both the inner arm 100 and the outer arm 200 are hollow and long strip-shaped flexible structures. The inner arm 100 includes several mutually hinged inner arm subunits to form a flexible bending effect, and the outer arm 200 includes several mutually hinged outer arm subunits. In order to form a flexible bending effect, the outer diameter of the inner arm 100 is smaller than the inner diameter of the outer arm 200 so that the inner arm 100 can be arranged in the outer arm 200 in a nested manner, and the inner arm 100 can extend and retract from the outer arm 200 .
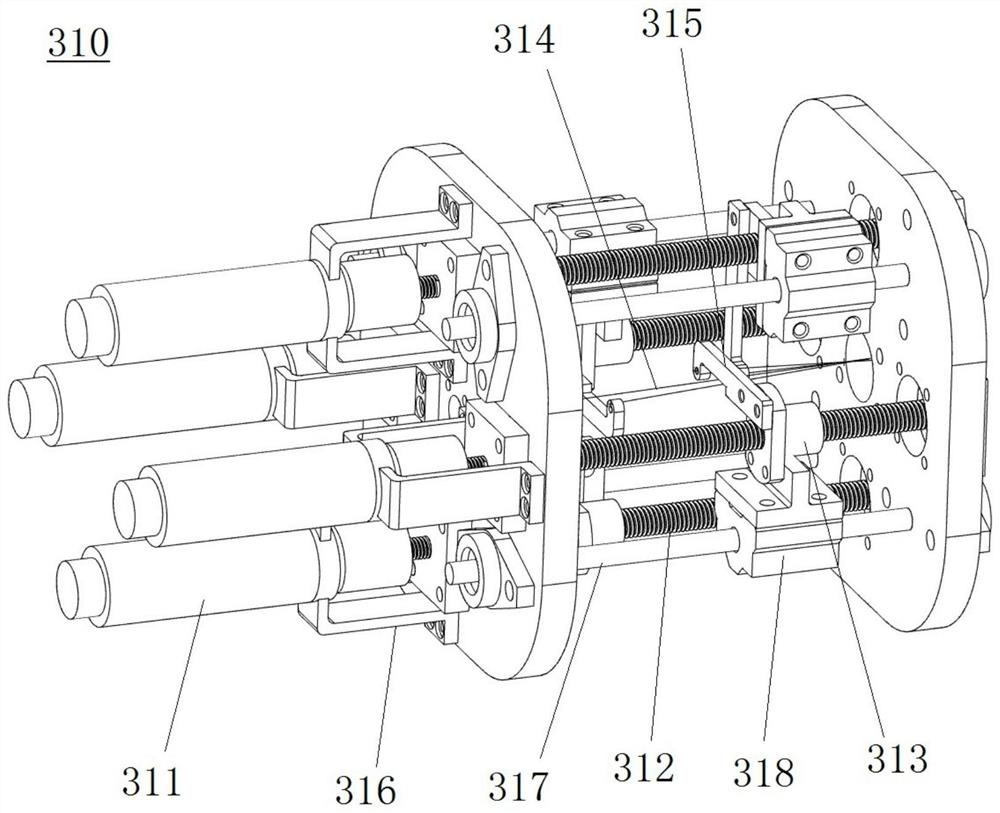
[0049] The inner arm drive device 300 in this embodiment includes an inner arm li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com