

A Monocular 6D Pose Estimation Method Based on Icosahedron
An icosahedron, pose estimation technology, applied in instruments, measurement devices, optical devices, etc., can solve problems such as difficulty in controlling cost and inability to meet versatility, achieve high precision, reduce pose estimation cost, and improve performance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Didpect the specific embodiments of the present invention are given below. DETAILED DESCRIPTION OF THE INVENTION TECHNOLOGer is only for further detailed description of the invention and is not limited to the scope of protection of the claims.
[0031] The present invention provides a monocular icosahedron. 6D pose estimation method (Method abbreviated) based, characterized in that the method comprises the steps of:
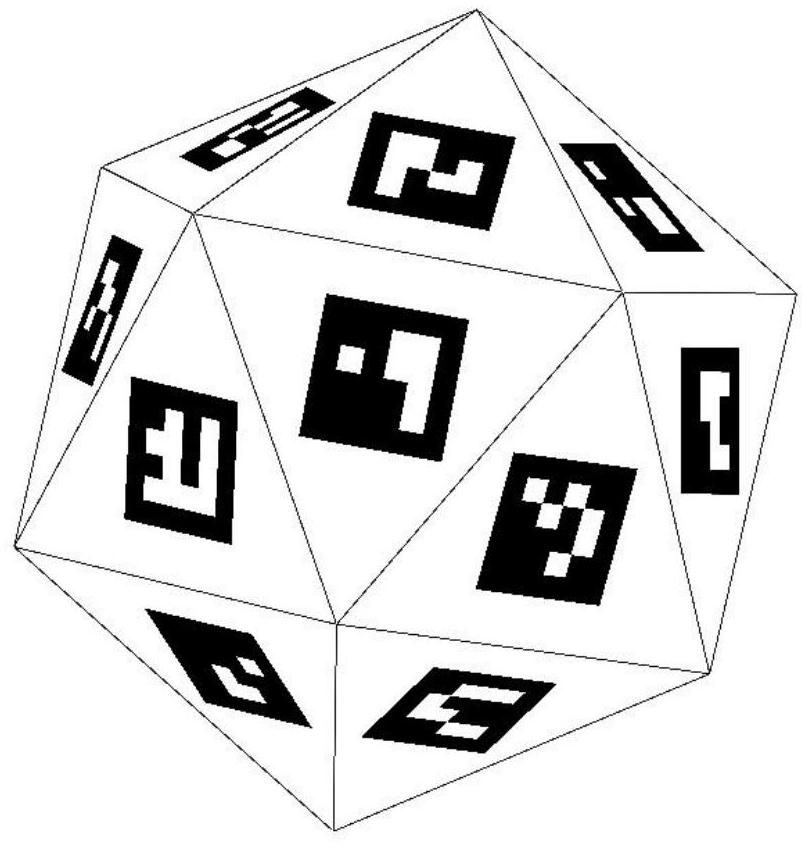
[0032] The first step, of using code ArUco icosahedron labeling, labeled code to obtain ArUco icosahedron (e.g. figure 1 Shown); monocular camera standard order, and then observed icosahedral ArUco code mark by the monocular camera calibration;
[0033] Preferably, the first step, ArUco codes icosahedron labeling process is: Use OpenCV image processing library to generate 20 ArUco code, the code 20 ArUco coding order are respectively attached to the icosahedron surface 20, and the code ArUco geometric center of the attachment surface and its geometric midpoint ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More