

Monocular 6D pose estimation method based on regular dodecahedron
A dodecahedron and pose estimation technology, which is applied in computing, image data processing, instruments, etc., can solve the problems of lack of versatility, achieve rapid detection, reduce the cost of pose estimation, and improve stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Specific examples of the present invention are given below. The specific embodiments are only used to further describe the present invention in detail, and do not limit the protection scope of the claims of the present application.
[0031] The present invention provides a kind of monocular 6D pose estimation method (abbreviation method) based on regular dodecahedron, it is characterized in that, this method comprises the following steps:
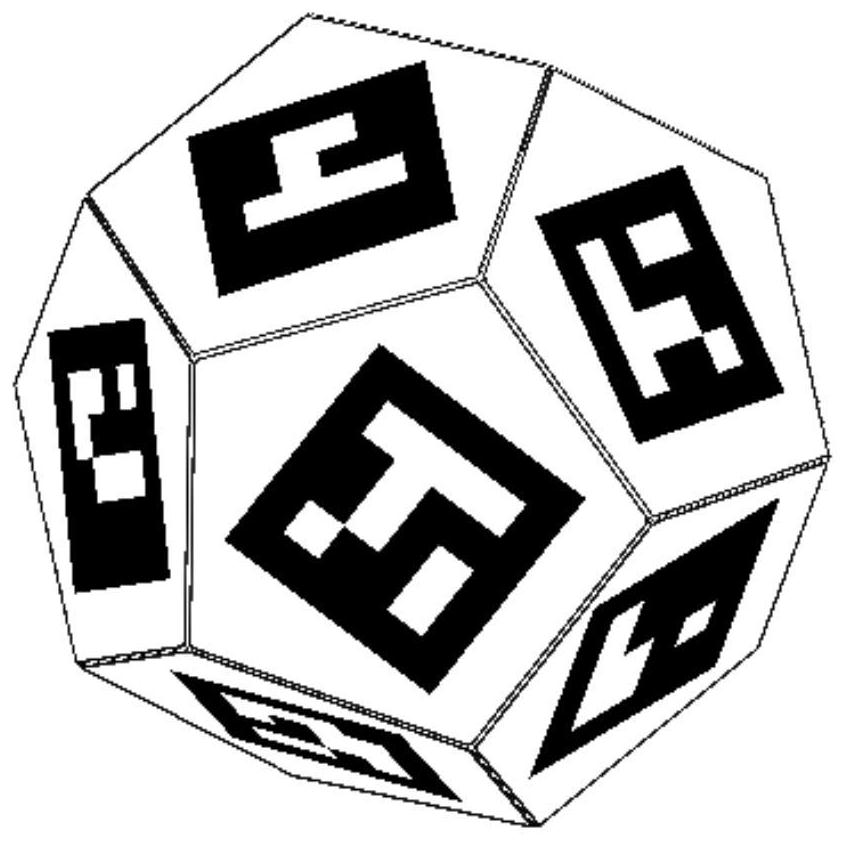
[0032] The first step, use ArUco code to mark regular dodecahedron, obtain the regular dodecahedron of ArUco code mark (such as figure 1 shown); calibrate the monocular camera, and then observe the regular dodecahedron marked by the ArUco code through the calibrated monocular camera;
[0033] Preferably, in the first step, the process of using the ArUco code to mark the regular dodecahedron is: use the OpenCV image processing library to generate 12 ArUco codes by C++ code, and attach the 12 ArUco codes to the regular dodecahedron acco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More