

Industrial robot joint idle stroke testing device and measuring method thereof
A technology of industrial robots and testing devices, which is applied in the direction of manipulators and manufacturing tools, can solve the problems of time-consuming, labor-intensive, and grease-increased costs, and achieve the effects of high measurement efficiency, high measurement accuracy, and convenient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further elaborated below.
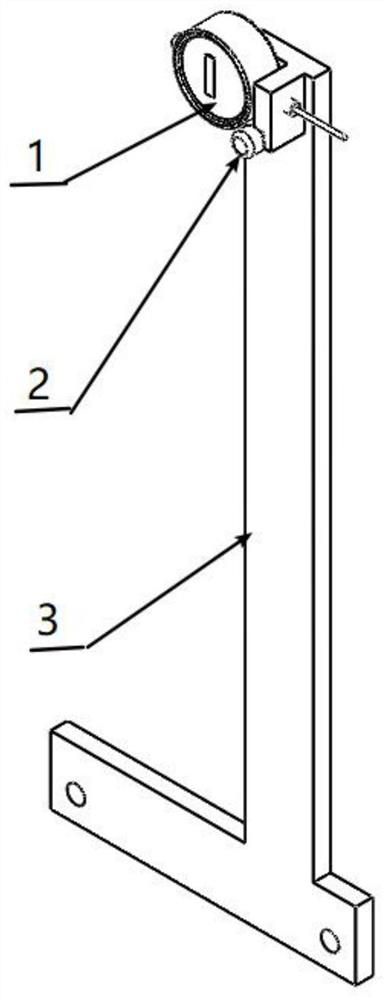
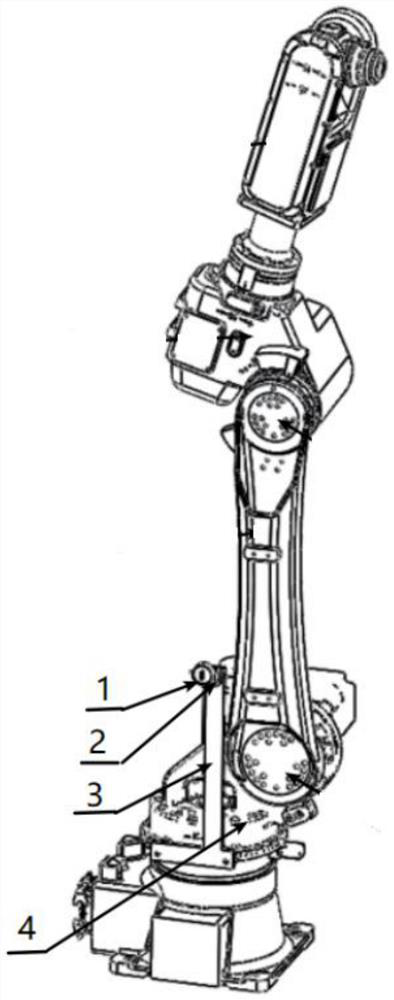
[0031] Such as Figure 1 to Figure 3 As shown, an industrial robot joint air travel test device includes:
[0032] The displacement sensor bracket 3 is connected with the industrial robot swivel seat 4 by bolts to provide positioning support;
[0033] The displacement sensor 1 is arranged on the displacement sensor bracket 3 and is used to measure the displacement of the robot arm around the J2 axis.
[0034] The displacement sensor bracket 3 is provided with a fastening knob 2 for tightening the displacement sensor 1 .
[0035] The displacement sensor bracket 3 is fixedly connected with the displacement sensor 1 .
[0036] The T-shaped bottom of described displacement sensor support 3 is connected with industrial robot swivel seat 4 bolts by the hole of two φ 10.
[0037] Compared ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More