

AZR adjusting method for real-time walking gaits of biped robot
A technology of biped robot and adjustment method, applied in the direction of control/adjustment system, instrument, adaptive control, etc., can solve the problems of consumption, not efficient method, multi-energy and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
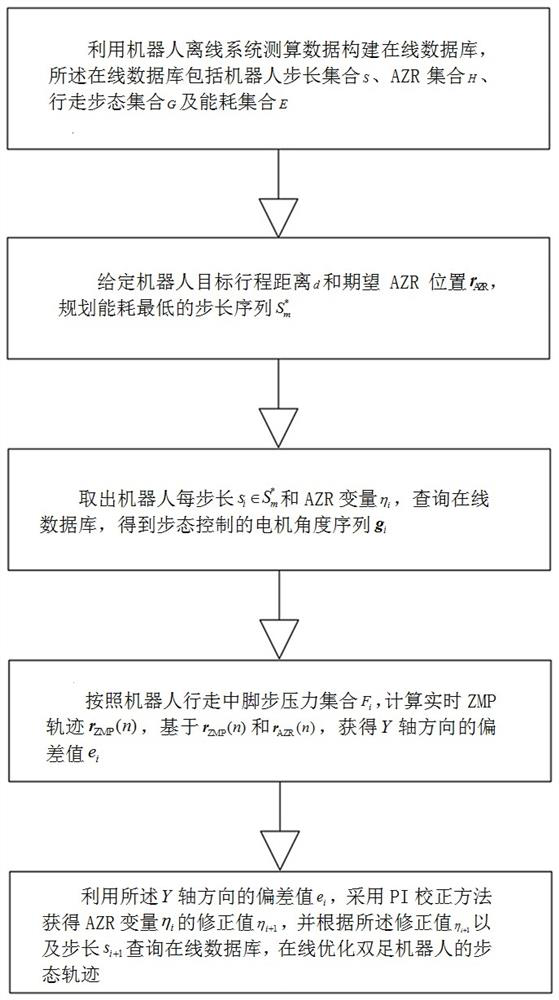
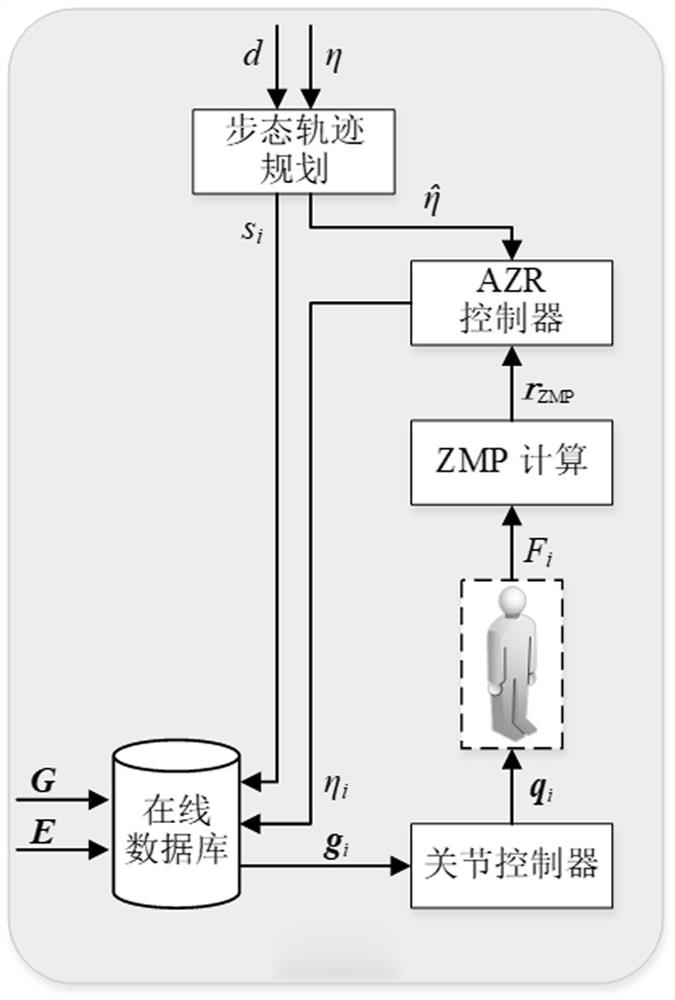
[0067] like figure 1 and figure 2 As shown, the AZR adjustment method of a biped robot walking real-time gait provided by the embodiment of the present invention, the method includes the following steps:
[0068] Step 1: Construct an online database using the calculated data of the robot offline system, the online database includes the robot step size set S, the AZR set H, the walking gait set G and the energy consumption set E;
[0069] Step 2: Given the target travel distance d of the robot and the desired AZR position r AZR , planning the step sequence with the lowest energy consumption
[0070] Step 3: Take out the length of each step of the robot and the AZR variable η i , query the online database, get the motor angle sequence g of gait control i ;
[0071] Step 4: According to the footstep pressure set F during robot walking i , to calculate the real-time ZMP trajectory r ZMP (n), based on r ZMP (n) and r AZR (n), get the deviation value e in the Y-axis di...
Embodiment 2
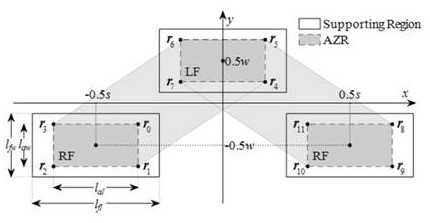
[0075] like Figure 4 and Figure 5 As shown, based on the above-mentioned embodiment 1, in this embodiment, in order to obtain the step size sequence with the lowest energy consumption , optimized step 2, specifically:
[0076] Step 2.1: The step sequence includes a start step, a stop step and a plurality of cycle steps s m , a plurality of said cycle steps s m The step lengths are equal, according to the robot motion rules, the definition of the initial step includes s 1 and s 2 , the stop step includes s c-1 and s c , let s 1 =s c , s 2 =s c-1 , and the total length of the start step and the stop step is 1~2 times the cycle step s m the step size;
[0077] Step 2.2: Given the target travel distance d of the robot, the cycle step s is known m The step size, calculate the initial step s by formula (1) 1 and s 2 step size:
[0078]
[0079] Among them, d b is the total length of the start step and the stop step; c is the total number of steps;
[0080] St...
Embodiment 3
[0087] Based on the above-mentioned embodiment 1, in the present embodiment, in order to draw the real-time ZMP track r ZMP (n) Step 4 is optimized, specifically:
[0088] Real-time ZMP trajectory r as described in step 4.1 ZMP (n) is expressed as:
[0089] r ZMP (n)=[x ZMP (n) y ZMP (n) 0] T (4);
[0090] Among them, x and y represent the front and side directions of the robot, respectively;
[0091] Combined with the formula (4), the robot walks the i-th step, and the value set F of the robot foot pressure sensor at the sampling point n is i (n), calculate the real-time ZMP trajectory r ZMP (n), as expressed in formula (5):
[0092]
[0093] in, and f i j (n)∈F i (n), respectively the position and pressure of the jth sensor in the x-axis direction and y-axis direction, c n is the number of sensors.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More