

AUV (Autonomous Underwater Vehicle) autonomous obstacle avoidance method based on reinforcement learning
A technology of reinforcement learning and obstacles, applied in two-dimensional position/channel control, instruments, control/regulation systems, etc., can solve problems such as being stuck in a stagnant state, not being a global optimal solution, and difficult for AUVs to approach the target point, etc. Robustness improvement, variable reduction effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
[0054] The purpose of the present invention is to use the reinforcement learning model to realize the optimal autonomous obstacle avoidance scheme under various constraint conditions. The embodiment uses the UWsimulator open source platform based on ros to construct. In the experiment, the simulated AUV is equipped with forward-looking and downward-looking image sonar, regardless of the influence of ocean current and roll.
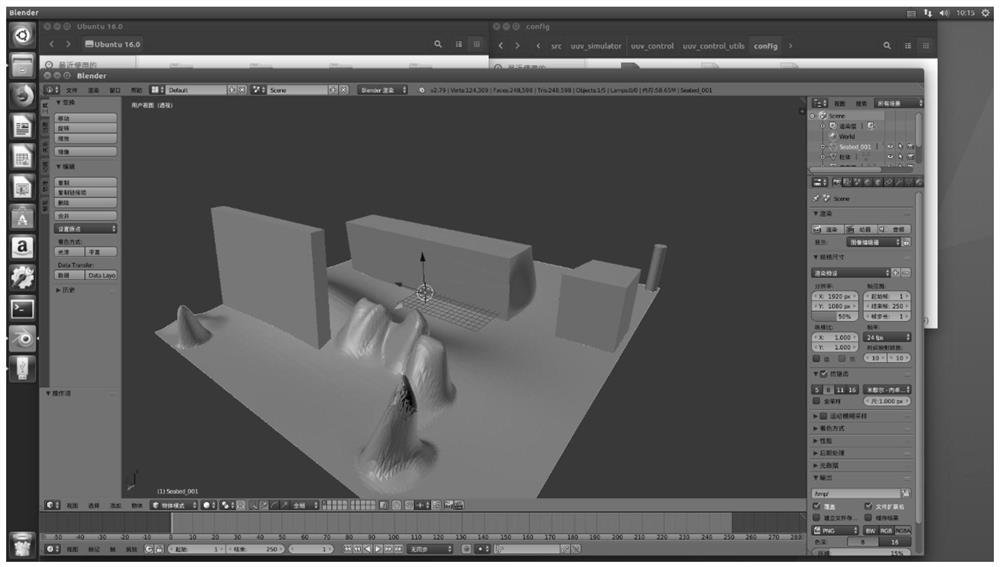
[0055] 1. Use UWsimulator and blender to build a more complex seabed simulation environment, including various regular and irregular obstacles and terrains. For details, see image 3 ;
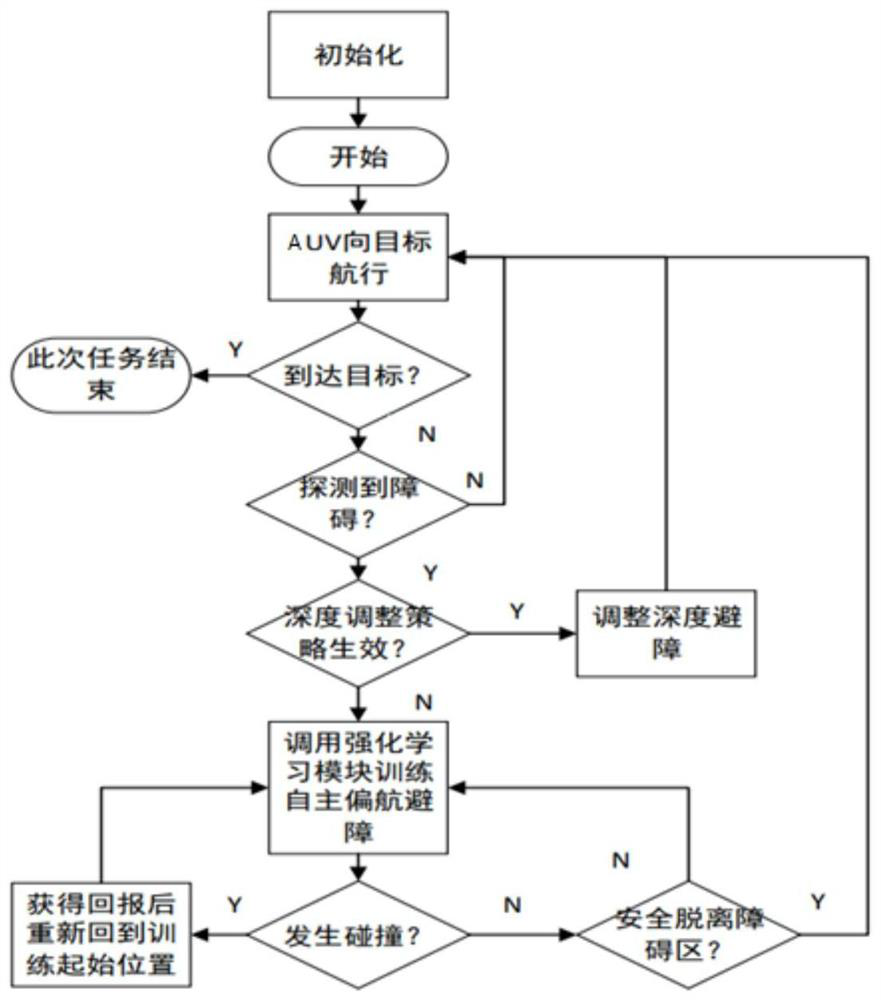
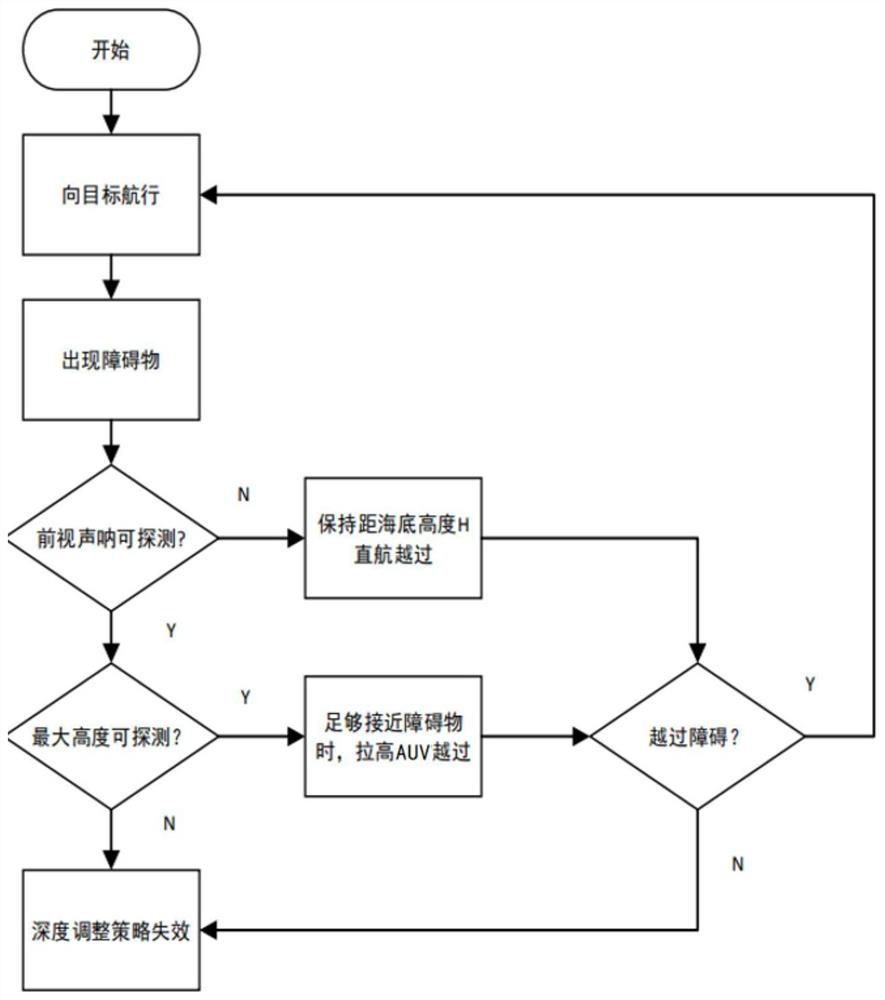
[0056] 2. Judging how obstacles should be avoided through the autonomous obstacle avoidance logic rules of submarine navigation. The main methods include adjusting AUV depth and yaw. Adjusting the AUV depth can avoid obstacles without changing the predetermined optimal route. Therefore, it is necessary to judge based on the height of the obstacle detected by the sonar. W...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More