

Robot camera calibration method based on edge scale adaptive defocusing fuzzy estimation
A scale-adaptive, robotic camera technology, applied in the field of visual perception, which can solve the problems of low defocus blur acquisition accuracy, no application, and low robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] It should be noted that, in the case of no conflict, the embodiments of the present invention and the features in the embodiments can be combined with each other. The present invention will be described in detail below with reference to the accompanying drawings and examples.
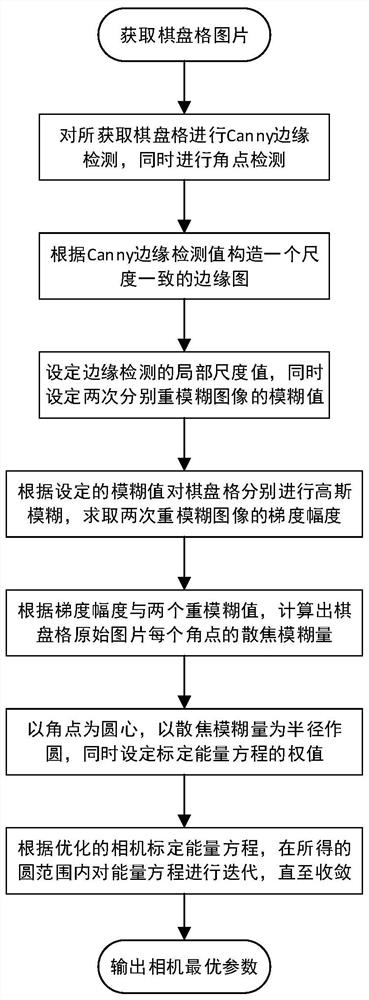
[0034] figure 1 Shown is a flowchart of a robot camera calibration method based on edge scale adaptive defocus blur estimation according to an embodiment of the present invention. The robot camera calibration method based on edge scale adaptive defocus blur estimation of this embodiment includes the following steps:
[0035] Step 1. Use the camera to be calibrated to obtain a checkerboard image;
[0036] Step 2, performing Canny edge detection and corner detection on the acquired checkerboard image;
[0037] Specifically, this step obtains Canny (I b ,σ c1 ), Canny (I b ,σ c2 )...Canny (I b ,σ cn ), and perform corner detection at the same time to obtain all corner coordinates, among the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More