

Adaptive force tracking control method based on iterative learning
A technology of tracking control and iterative learning, applied in the field of robotics, can solve problems such as errors in the identification process, proof of stability, failure to obtain force tracking control effects, etc., and achieve the effect of precise tracking and high robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0038] A kind of adaptive force tracking control method based on iterative learning of the present invention, comprises the following steps:
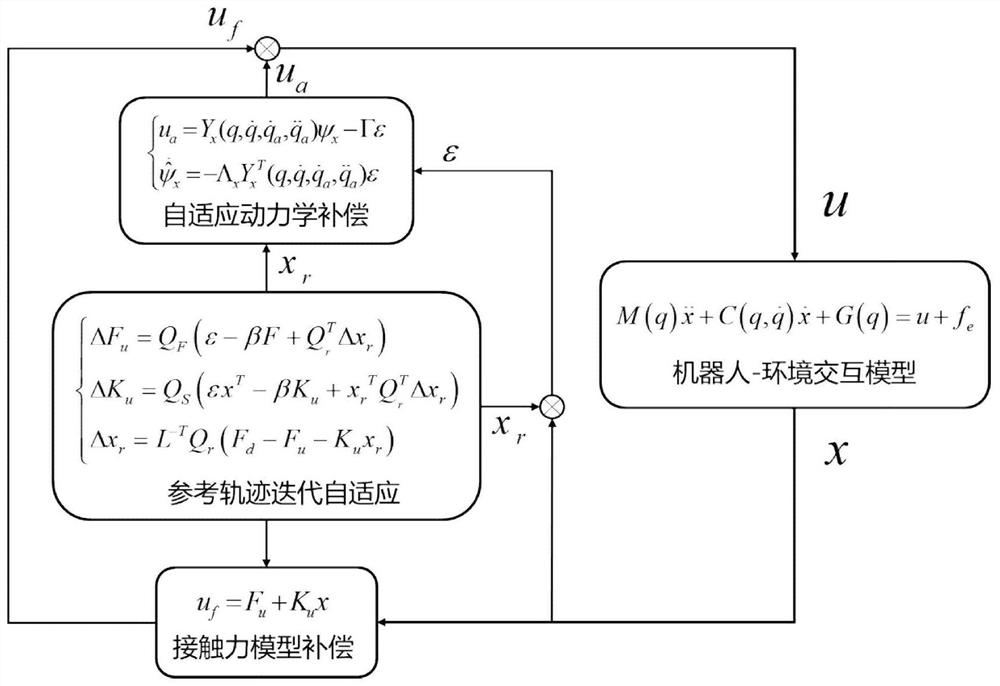
[0039] Step 1: Design an adaptive dynamics compensation controller based on the regression model. The robot dynamics model can be decomposed into a regression matrix multiplied by the inherent dynamic parameters of the robot. According to the Lyapunov stability theorem, the update rate of the regression matrix can be given, and then an adaptive controller can be obtained to compensate the robot dynamics. Model.
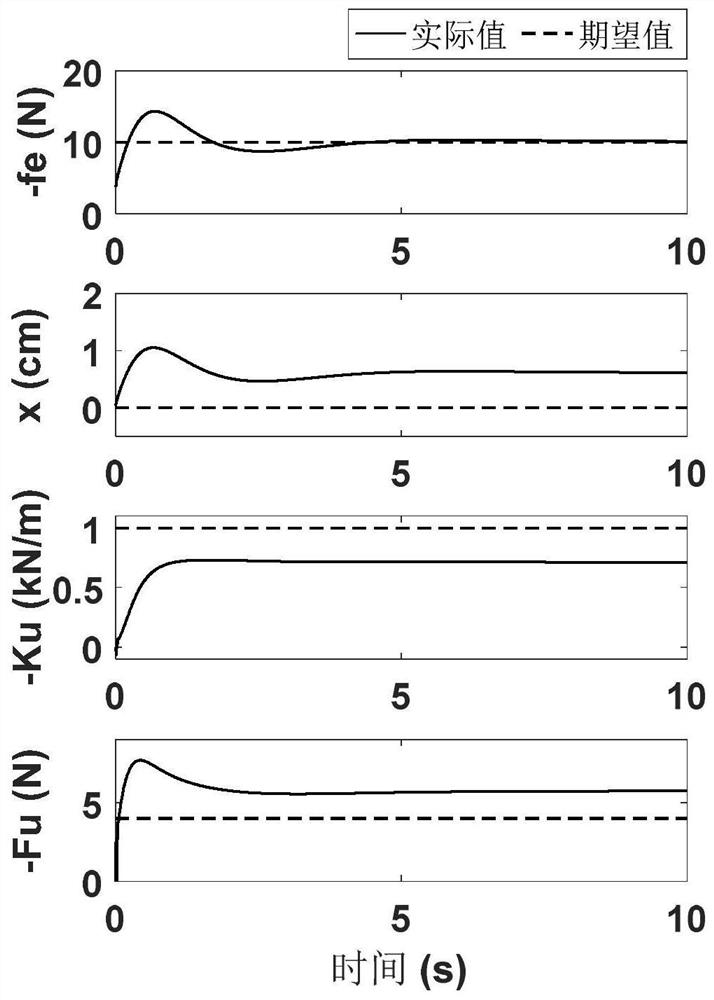
[0040] Step 2: Estimate environmental feedforward force, environmental impedance parameters and reference trajectory based on iterative learning algorithm. As the iterative learning time progresses, the environmental feed-forward force, environmental impedance parameters and reference traject...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More