Fault-tolerant control method for fast terminal sliding mode of nonlinear system under actuator fault
A nonlinear system, terminal sliding mode technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of slow convergence speed, slow convergence speed, not global optimal convergence time, and easy damage to UAV instruments. and other problems to achieve the effect of reducing chattering, avoiding spike problems, and improving practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
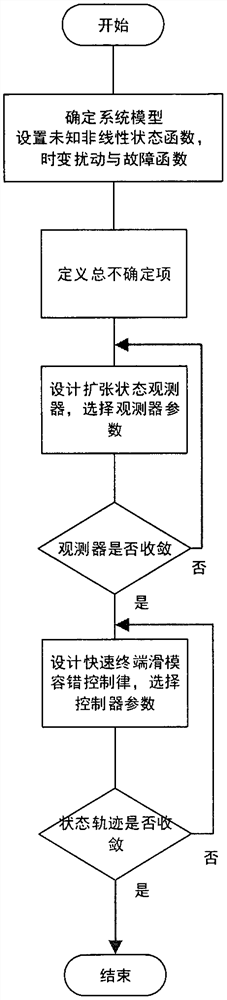
[0048] The present invention will be further explained below in conjunction with the accompanying drawings.
[0049] Such as figure 1 As shown, for the general passive fault-tolerant algorithm needs to obtain the fault limit and the time delay observer needs to manually set the fault detection threshold, the present invention uses the extended state observer to estimate the total uncertain item and its derivative of the system, so as to realize the total uncertain item including the fault item There is no need to obtain the fault limit in advance, and it is not necessary to set the fault detection threshold of the observer; considering that the exponential asymptotic convergence of the general linear sliding mode surface is difficult to meet some scenarios that require high system response speed, A new fast terminal sliding mode surface is adopted, which makes the whole process of convergence faster than that of the linear sliding mode surface, so as to realize the limited tim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More