Method for identifying parameters of space target under double-arm capture based on kinetic model
A dynamic model and parameter identification technology, which is applied to manipulators, aerospace equipment, tools, etc., can solve problems such as force, torque, and acceleration that are difficult to measure, and achieve good universality, high accuracy, and improved identification efficiency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
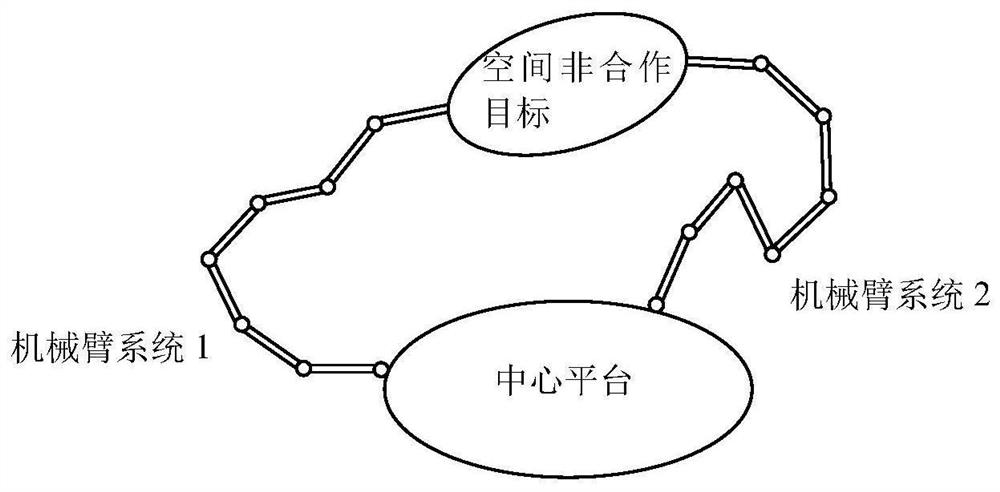
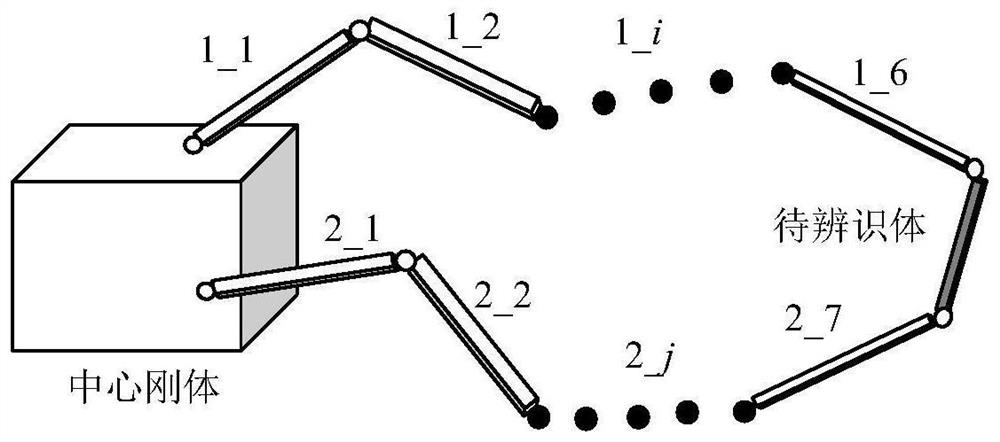
[0393] Attached below Figure 1-3 As shown, taking a certain type of spacecraft system as an example, the implementation process of the present invention is described in detail.
[0394] First, the relevant parameters of the spacecraft are given as follows:
[0395] Assuming that the two manipulator arms of the space robot each have seven links (including end effectors), which are respectively connected by six rotating hinges, the direction of rotation of each segment of the two manipulators (relative to the body coordinates of each segment of the manipulator) system) are "x", "y", "y", "z", "y", "z", "z", the parameters of each link and gripper of the two robotic arms of the space robot are the same, and the model The parameters are shown in the table below. Assume the platform initial attitude angular velocity [333] T (° / s).
[0396]
[0397]
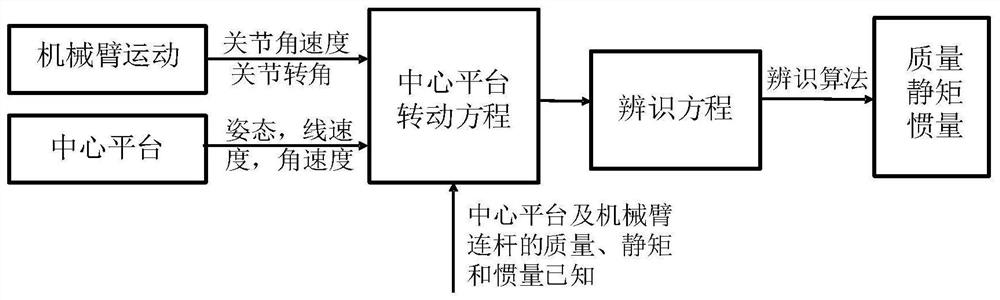
[0398] In the following, the identification method of the quality characteristic parameter of the space non-cooperative ta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More