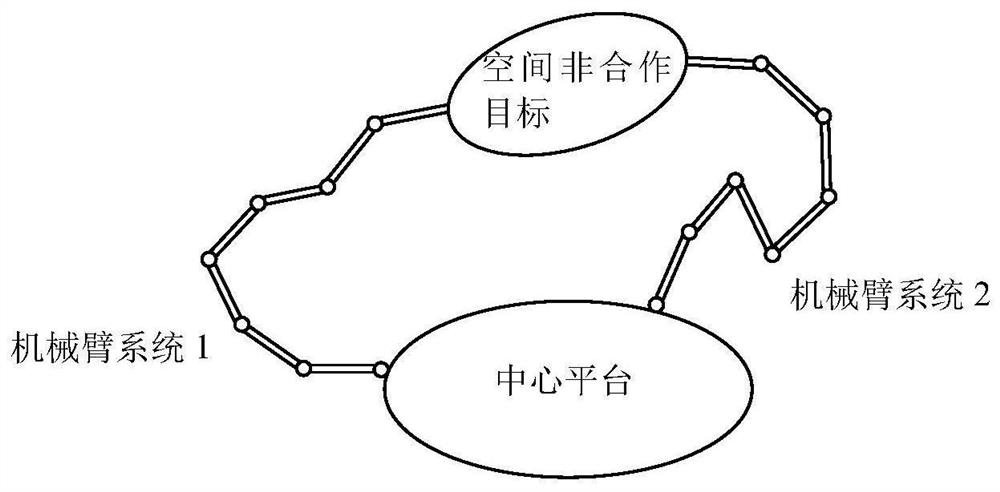
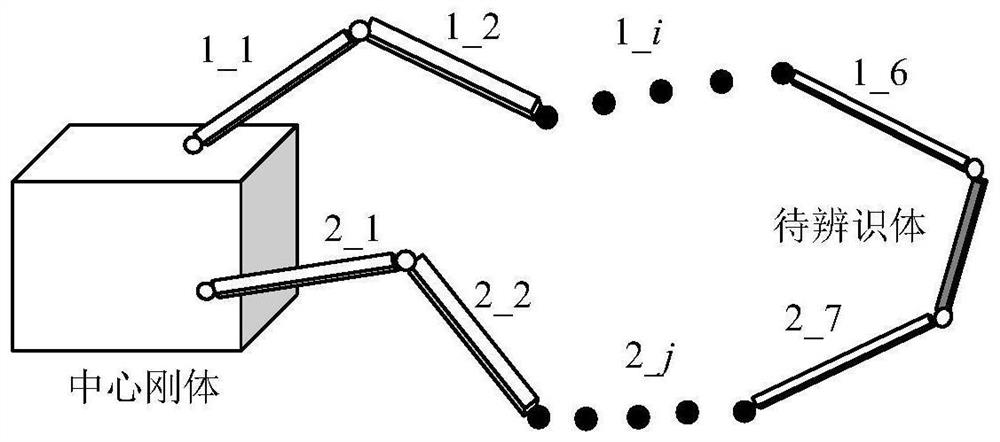
A Dynamic Model-Based Method for Identification of Spatial Target Parameters under Dual-Arm Capture
A dynamic model and parameter identification technology, applied in space navigation equipment, program-controlled manipulators, manipulators, etc., can solve problems such as difficulty in measuring force, torque, and acceleration, achieve good universality, and improve identification efficiency and accuracy. high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0396]
[0397]
[0398] Begin to use the space non-cooperative target quality characteristic parameter identification method designed by the present invention to identify.
[0400] Assumptions are made following step 1 above.
[0402] 2.1 Define the coordinate system and associated variables: Define the associated coordinate system and variables as described in step 2.1 above.
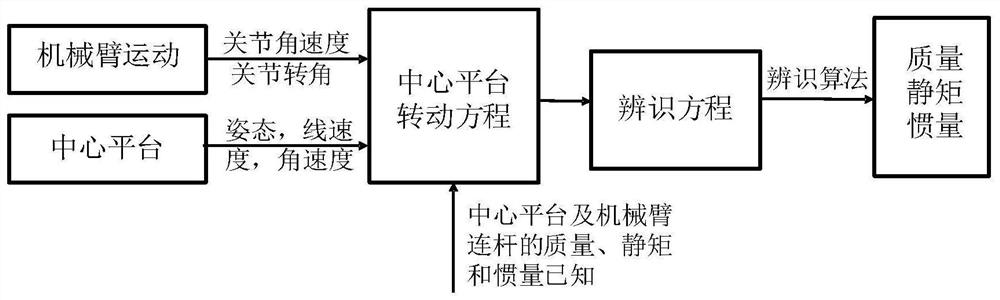
[0404] 2.3 Establish the closed-chain system dynamics equation after double-arm capture:
[0405] 2.3.1 Establish the dynamic equations for each body, written as a condensed form of the system dynamics model
[0406] Based on the Kane method, the kinetic equations of each body were established in accordance with the aforementioned step 2.3.1, and rewritten as a contraction
[0407] 2.3.2 Establishing the kinetic equation after combining the kinematic relationship
[0408] The kinetic equation combined with the kinematic relationship was established in step 2.3.2 above.
[0409] 2.3.3 Setting closed-chain c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More