

A Tightly Coupled Initialization Method for Underwater Visual Inertial Navigation Pressure Positioning
An initialization method and a tightly coupled technology, which is applied in navigation, surveying and navigation, navigation calculation tools, etc., can solve the problems of initialization parameter errors and initialization parameters affecting robot positioning accuracy, and achieve the effect of improving system accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the object, technical solution and technical effect of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
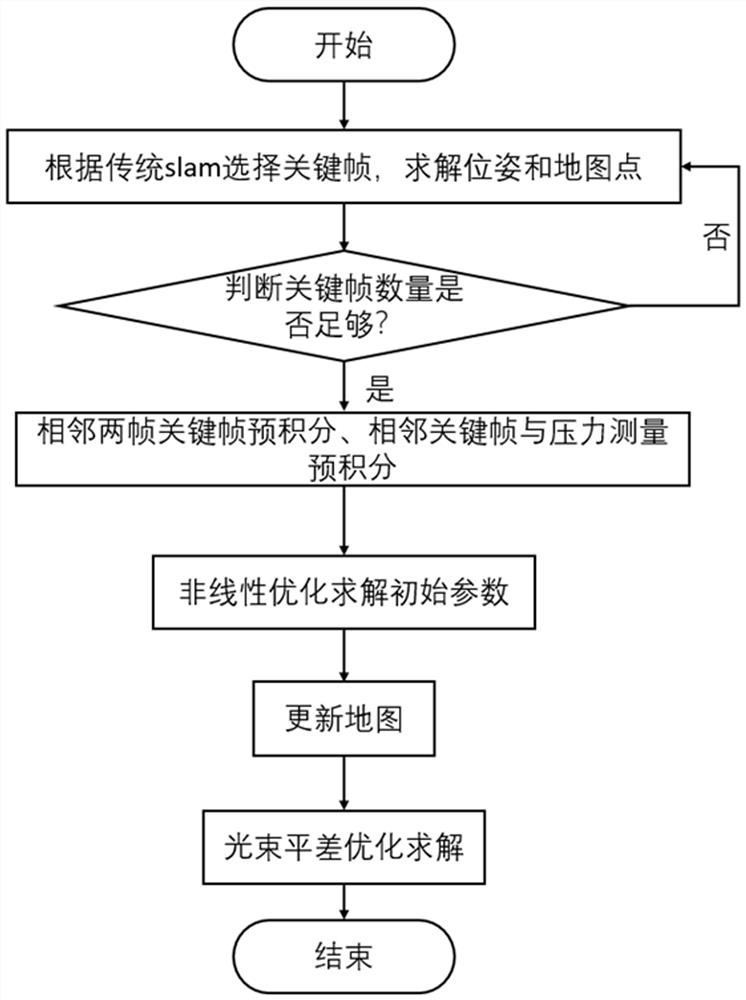
[0030] Such as figure 1 As shown, a tightly coupled initialization method of underwater visual inertial navigation pressure positioning of the present invention comprises the following steps:
[0031] Step (1) Use the slam method based on the direct method or the feature point method to solve the monocular trajectory under the sub-scale, select the key frame within a few seconds to solve, save the pose of the key frame and related map point information, and judge the current map. The number of key frames, specifically includes the following steps:
[0032] (1.1) Perform feature matching between the incoming image of each frame and the previous image, solve the current frame image pose, and triangulate the matched feature points, and save the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More