Control method for empennage of unmanned aerial vehicle
A control method and technology of unmanned aerial vehicles, which are applied in aircraft control, aircraft parts, aircraft stability and other directions, can solve the problems of flight resistance not being controlled to a minimum, increased energy consumption, and inability to adjust control, so as to improve handling performance and reduce resistance. , the effect of ensuring safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the present invention. Apparently, the described embodiments are only illustrative partial implementations of the present invention, and are not intended to limit the scope of the present invention. , any equivalent changes and modifications made by those skilled in the art without departing from the concepts and principles of the present invention shall fall within the protection scope of the present invention.
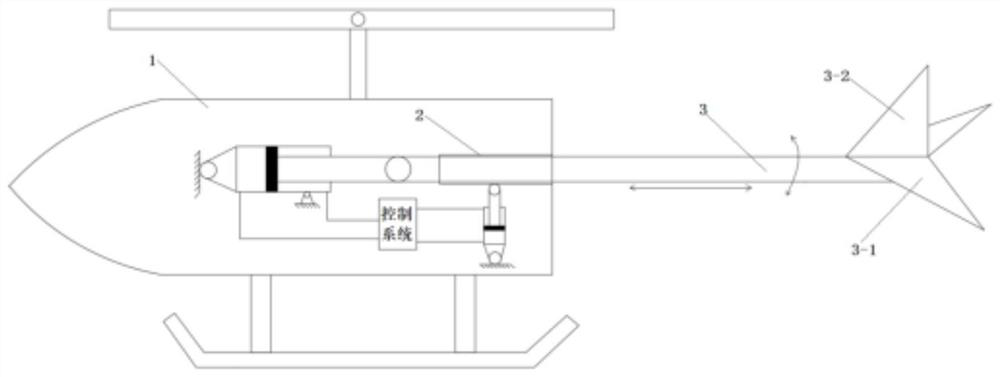
[0029] The invention provides a method for controlling the tail of an unmanned aerial vehicle, such as figure 1 As shown, the empennage 3 has a horizontal empennage 3-1, a vertical empennage 3-2 and a sliding rod, a part of the sliding rod is arranged in the UAV main body 1, and one of the sliding sleeves of the sliding rod in the UAV main body 1 is provided with Sliding cylinder 2, the drone main b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com