

Newly-added sampling method for estimating positioning error of mechanical arm in area
A positioning error and robotic arm technology, applied in the field of robotics, can solve problems that affect the compensation efficiency of the robotic arm, low absolute positioning accuracy, and affect the accuracy of compensation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to facilitate those skilled in the art to understand the technical content of the present invention, the content of the present invention will be further explained below in conjunction with the accompanying drawings.
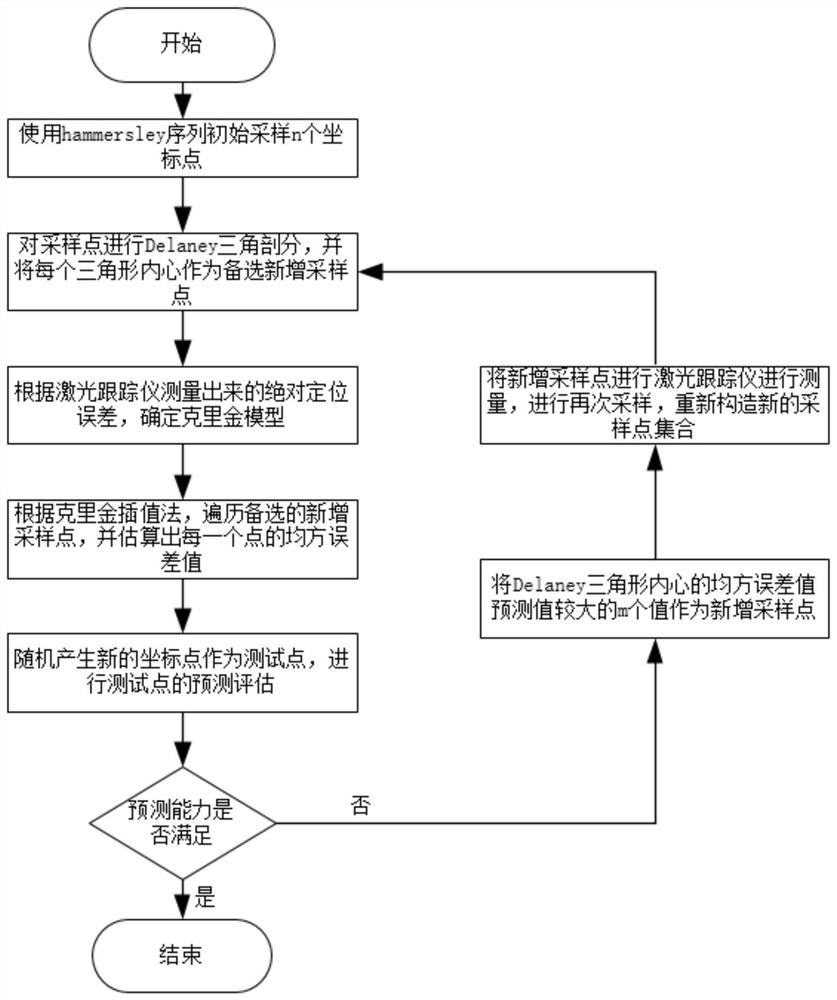
[0026] Such as figure 1 Shown is the realization process of the present invention, specifically comprises the following steps:
[0027] Step 1: Preparation for using the equipment.
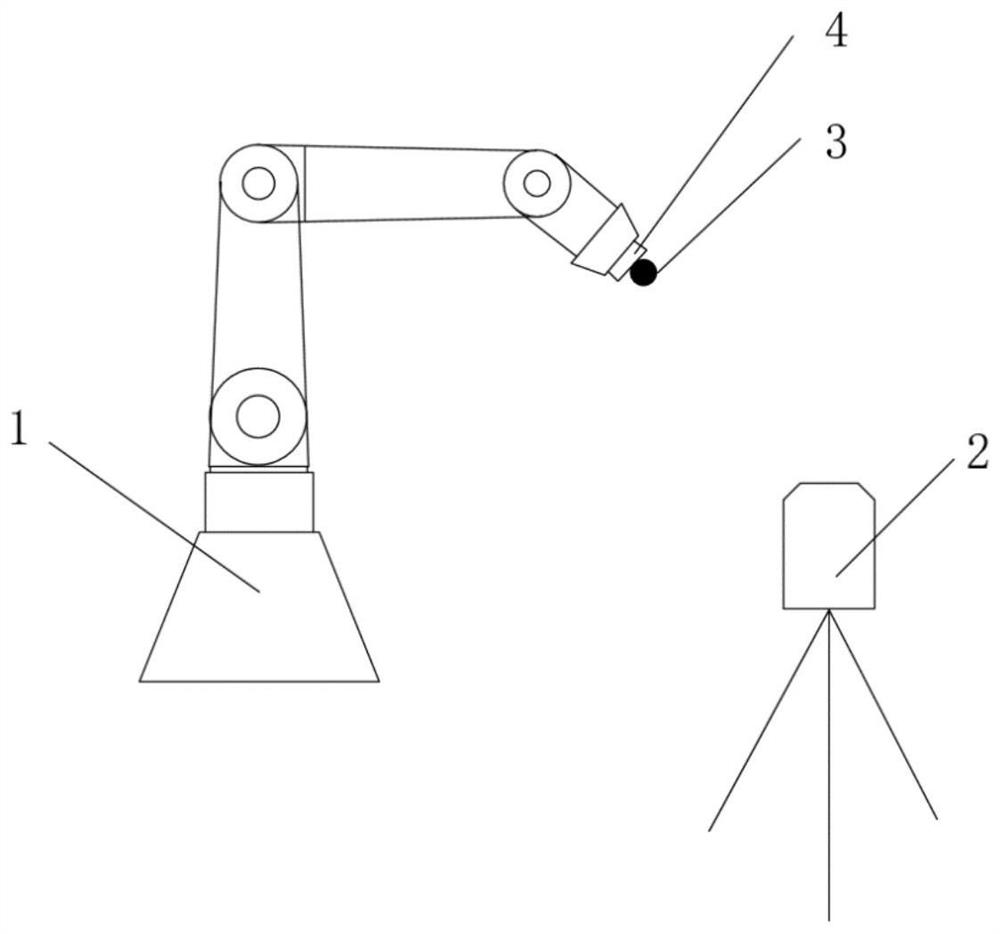
[0028] First, install the equipment and install the laser tracker on the ground outside the movement space of the industrial robot, and install a fixture at the end of the robot arm to hold the parts that absorb the target ball, and then attach the target ball to the parts at the end of the robot arm .
[0029] Step 2: Measure the tool coordinate system of the target ball, and align the laser tracker with the base of the robotic arm.
[0030] Take the center of the target ball as the center point of the tool, measure it with the laser tracker, use the target ball ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More