

Self-adaptive event triggering output feedback control method and system of time-delay switching system
A switching system and event-triggered technology, applied in the direction of adaptive control, comprehensive factory control, general control system, etc., can solve the problems of not using the average dwell time, waste of communication resources, etc., and achieve the goal of solving resource waste and saving communication resources Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0039] Such as figure 1 As shown, the present embodiment provides an adaptive event trigger output feedback control method of a time-lag switching system, including the following steps:
[0040] (1) Determine the kinetic equation of the nonlinear system;
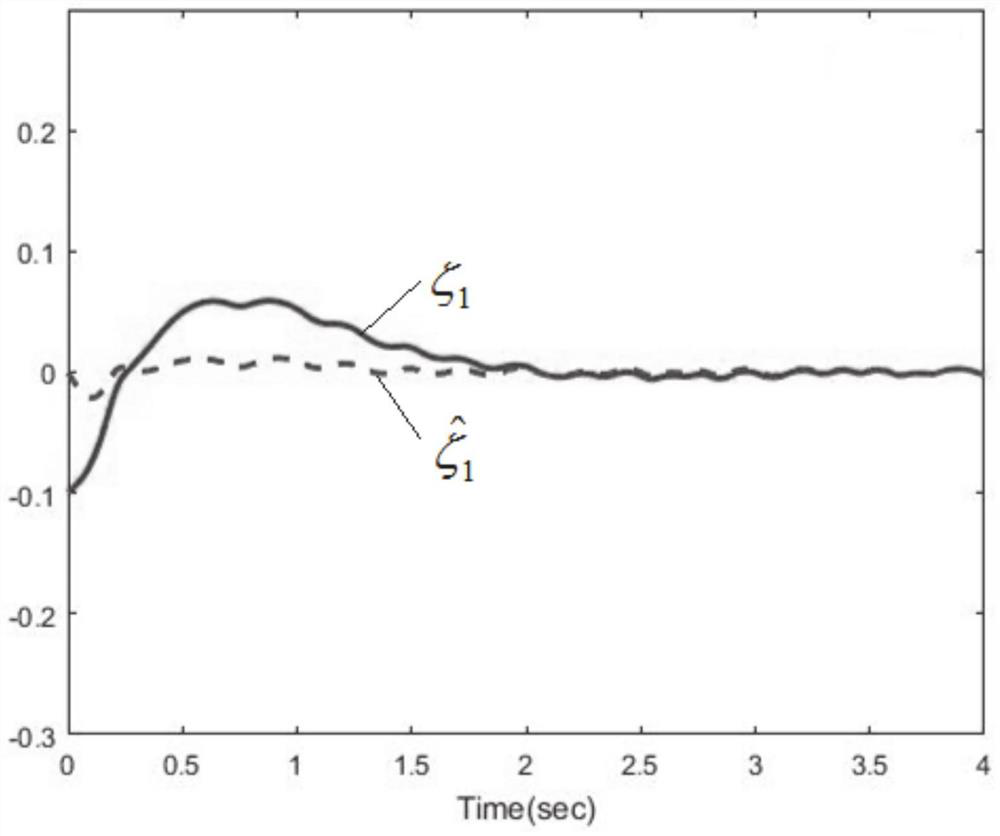
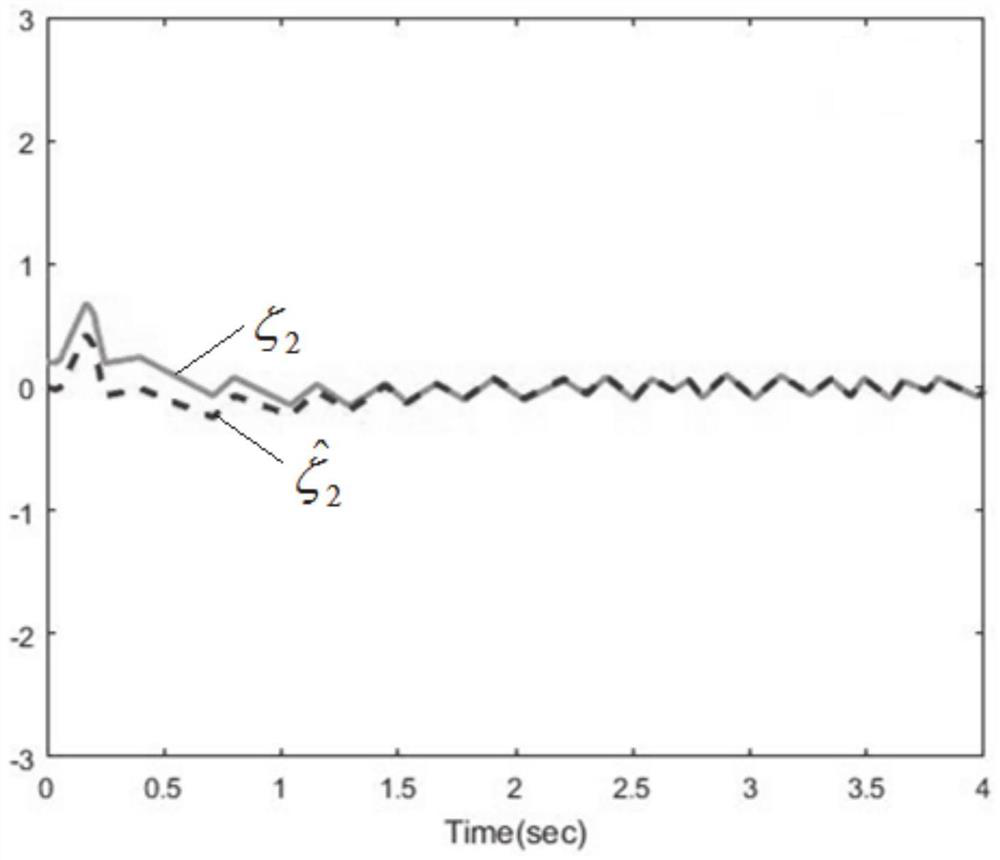
[0041] (2) Estimation of unknown system status variables according to the switching state observer, to convert the dynamics equation to the dynamics equation;
[0042] (3) The state error equation is lagged by Lyapunov-Krasovskii function compensation, defining the virtual control rate and adaptation rate by the anti-stepping method and intelligent approximation techniques, and the virtual controller is constructed;
[0043] (4) Design an event trigger controller to reduce communication resources;
[0044] (5) Under the event trigger mechanism, the virtual controller is controlled to control the time-delay switching system to switch when the signal of the signal of the time-hysteresis system is switched.
[0045] The implementat...
Embodiment 2
[0194] This embodiment provides an adaptive event trigger output feedback control system for a time-hysteresis switching system, including:
[0195] Dynamic modeling module, is configured to determine the kinetic equation of the time-delay switching system;
[0196] The status estimation module is configured to estimate unknown status variables based on the switching state observer to convert the dynamics equation to obtain a status error equation;
[0197] The controller build module is configured to lag when the status error equation is compensated by the Lyapunov-KraSovskii function, and the virtual controller is constructed by defining the virtual control rate and the adaptive rate;
[0198] The trigger module is configured to control the time-hysteresis switching system based on the virtual controller under the event trigger mechanism to switch when switching from the signal of the time-hysteresis switching system.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More