

Flexible calibration method for binocular vision system based on one-dimensional coding target
A binocular vision system and calibration method technology, applied in the field of binocular vision system calibration, can solve problems such as the lack of universality and flexibility of algorithms, inconvenient stereo matching, and low recognition accuracy, and achieve easy processing and manufacturing, eliminating Effects of noise interference and improvement of recognition accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
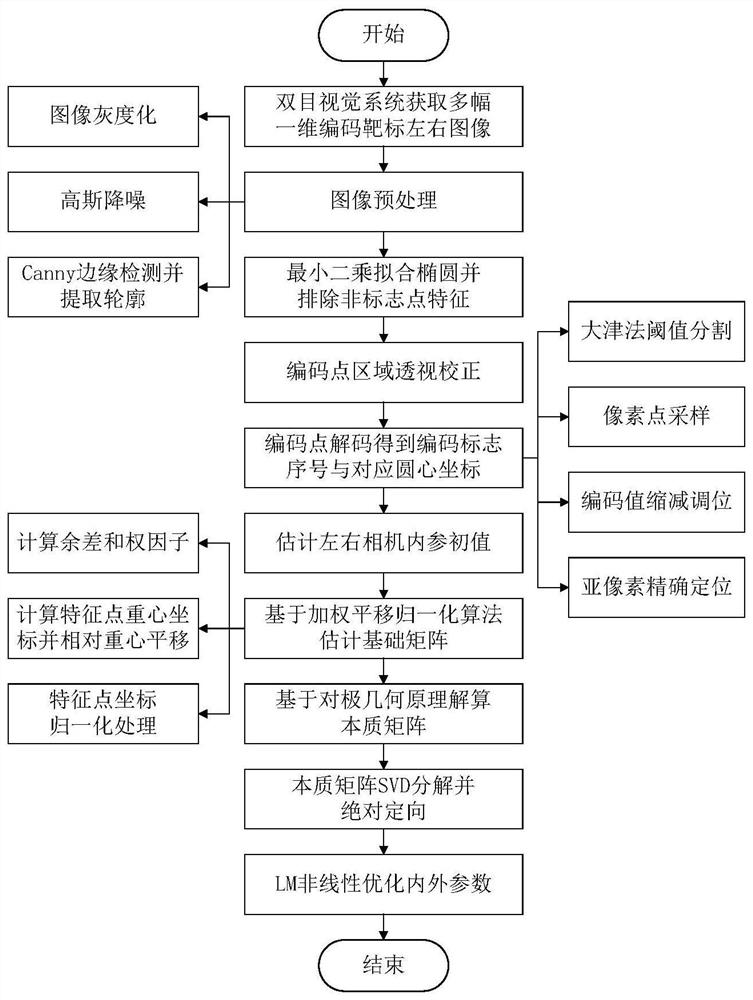
[0027] Such as figure 1 As shown, the flexible calibration method of the binocular vision system based on the one-dimensional coding target of the present invention comprises the following steps:
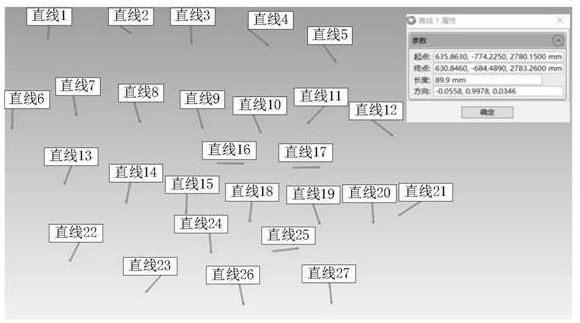
[0028] (1) Process the circular coded marker points on the one-dimensional target and acquire the image
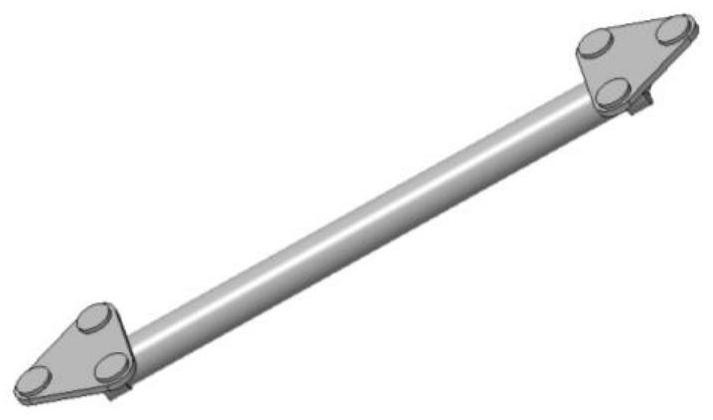
[0029] Such as figure 2 Shown is a one-dimensional target of the present invention; as image 3 Shown is the circular coded marker point of the present invention. Compared with the traditional circular marker point, the coded marker point has the characteristics of good recognition and high matching degree, which makes the matching algorithm of the corresponding feature point of the one-dimensional target simpler and more universal . Generally speaking, although the recognition speed of traditional circular marker points is fast, there is n...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More