

Unmanned aerial vehicle flight path tracking identification method based on machine learning
A technology of machine learning and recognition methods, applied in the field of navigation deception, to achieve the effect of strong versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in detail below, and it should be understood that the content described here is only for explaining the present invention and not limiting the present invention.
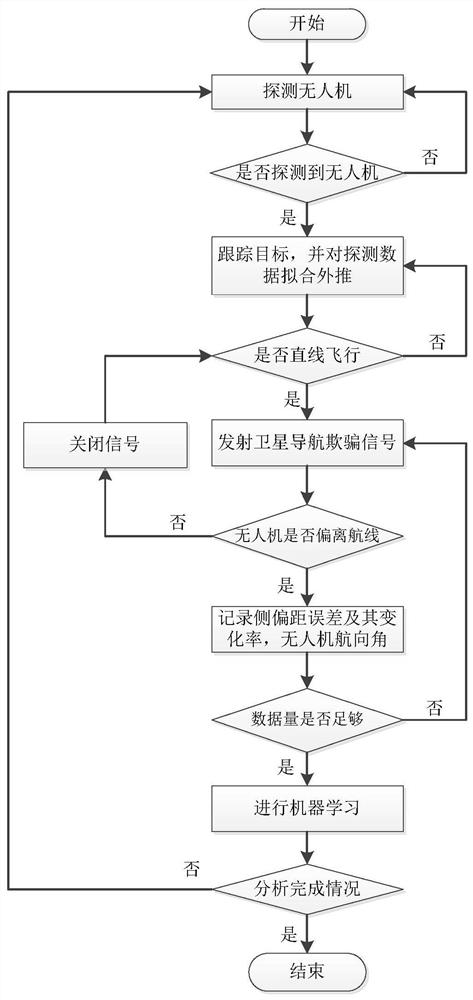
[0025] The flow chart of navigation deception signal generation and realization is as follows: figure 1 shown.
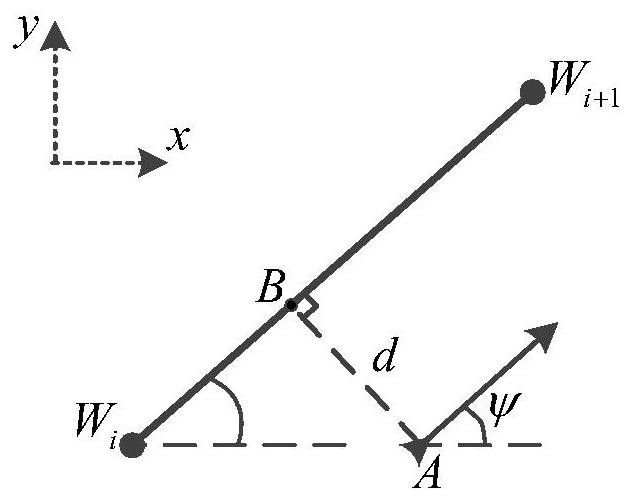
[0026] figure 2 It is the diagram of physical quantities such as side offset distance, side offset distance error change rate and UAV heading angle involved in the present invention, wherein x, y represent the x-axis and y-axis of the Cartesian coordinate system respectively, and W i W i+1 Indicates the planned track (straight line), A is the current position of the drone, ψ is the angle between the flight direction of the drone and the x-axis, that is, the heading angle of the drone, AB⊥W i W i+1 , d=AB, d is side offset distance, is the rate of change of side offset;
[0027] The technical scheme adopted in the present invention is:
[0028] A meth...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More