

Power robot solid-state area array laser radar ranging device
A technology of laser radar and ranging device, which is applied in the field of solid-state area array laser radar ranging devices for electric robots, and can solve the problem of inability to measure the distance of electric inspection robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
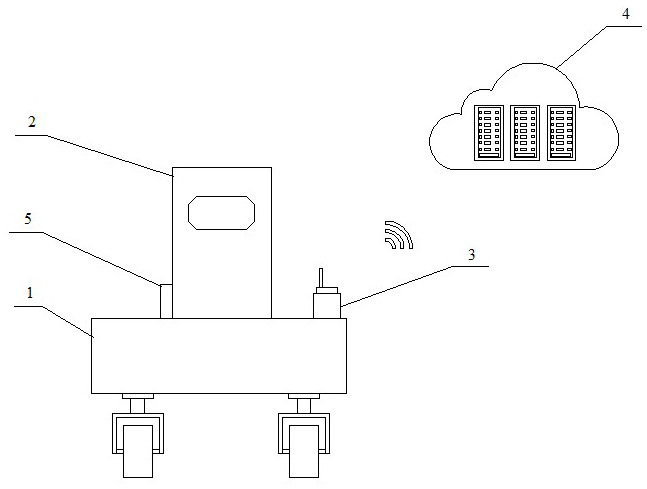
[0031] like figure 1 As shown, a solid-state area array laser radar distance measuring device for an electric robot includes a robot body 1, and a solid-state area array laser radar 2 arranged on the robot body 1, and the solid-state area array laser radar 2 passes through a wireless transmission module 3. Information interconnection with the cloud server 4, the solid-state area laser radar 2 collects the measurement information of any two points in the measurement area except the measurement point, and transmits to the cloud server 4, and the cloud server 4 is based on the measurement of the two points The information calculates the coordinates of two points and the distance between them.
[0032] The measurement information includes the distance value output by the solid-state array laser radar sensor, the vertical angle of the solid-state array laser radar sensor, and the horizontal angle of the solid-state array laser radar sensor.
[0033] The cloud server 4 constructs a...
Embodiment 2
[0045] The solid-state area array lidar distance measuring device of the electric robot in the embodiment of the present invention is a further improvement to the first embodiment:
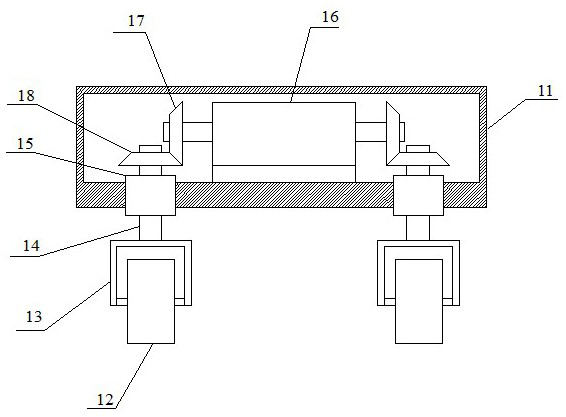
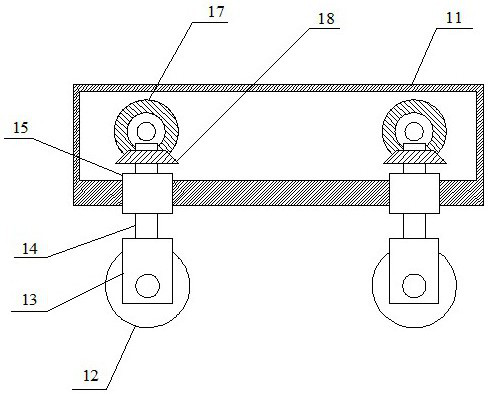
[0046] like Figure 2~3 As shown, the robot body includes a chassis 11, a double-sided shaft hub motor wheel 12, a steering module, a controller and a wireless signal transceiver, and the bottom of the chassis 11 is provided with four described double-sided shaft hub motor wheels 12, each of which A bracket 13 is arranged on both sides of the hub motor wheels 12, and a shaft body 14 is fixedly arranged on the bracket 13, and the shaft body 14 is connected with a bearing 15 arranged at the bottom of the chassis 11.
[0047] The steering module includes a double shaft extension motor 16 and a bevel gear, the two output shafts of the double shaft extension motor 16 are provided with a first bevel gear 17, and the upper end of the shaft body 14 is provided with a second bevel gear 18 , the first beve...
Embodiment 3
[0051] A solid-state area array laser radar distance measuring device for an electric robot, comprising a robot body and a solid-state area array laser radar arranged on the robot body, the solid-state area array laser radar is interconnected with a cloud server through a wireless transmission module, and the The solid-state area laser radar collects the measurement information of any two points in the measurement area except the measurement point, and transmits it to the cloud server, and the cloud server calculates the coordinates of the two points and the distance between the two points based on the measurement information of the two points. the distance.
[0052] The measurement information includes the distance value output by the solid-state array laser radar sensor, the vertical angle of the solid-state array laser radar sensor, and the horizontal angle of the solid-state array laser radar sensor.
[0053] The cloud server constructs a 3D point cloud image according to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More