

Six-rotor unmanned aerial vehicle MPC control method based on ROS platform
A control method and unmanned aerial vehicle technology, applied in the direction of attitude control, non-electric variable control, control/adjustment system, etc., can solve the problems of low control accuracy, poor flight stability of unmanned aerial vehicle, relying on manual remote control, etc., and achieve simplified control target effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention will be described in detail below with reference to the drawings and embodiments. At the same time, the technical problems and beneficial effects solved by the technical solution of the present invention are also described. It should be pointed out that the described embodiments are only intended to facilitate the understanding of the present invention, and have no limiting effect on it.
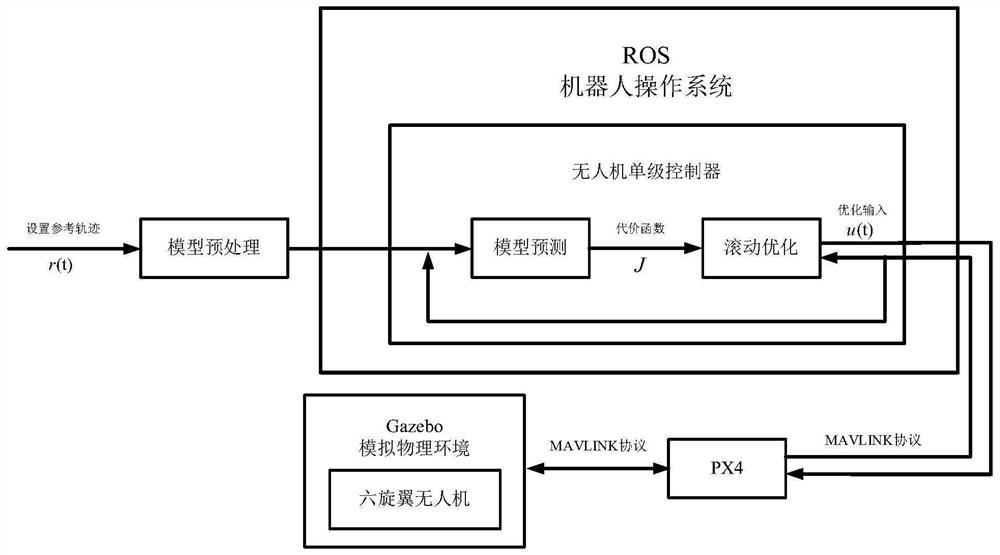
[0052]refer to figure 1 , a ROS platform-based six-rotor unmanned aerial vehicle MPC control method disclosed in this embodiment, specifically includes the following steps:
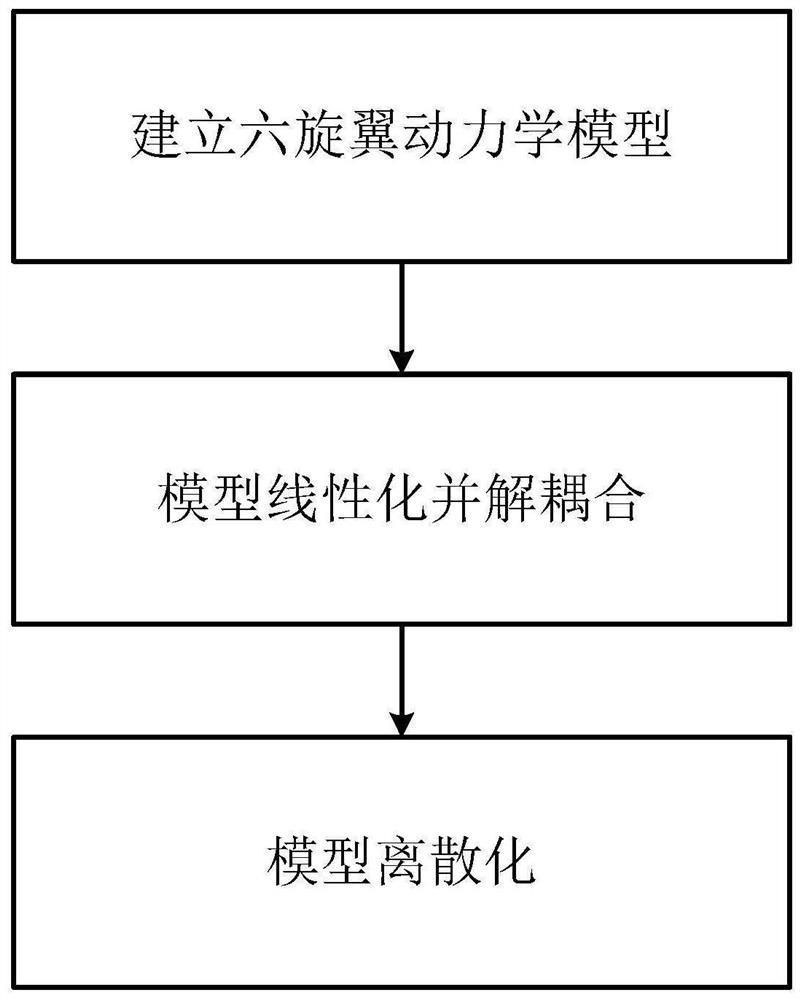
[0053] Step 1: Model preprocessing. refer to figure 2 Model and Process Flowchart
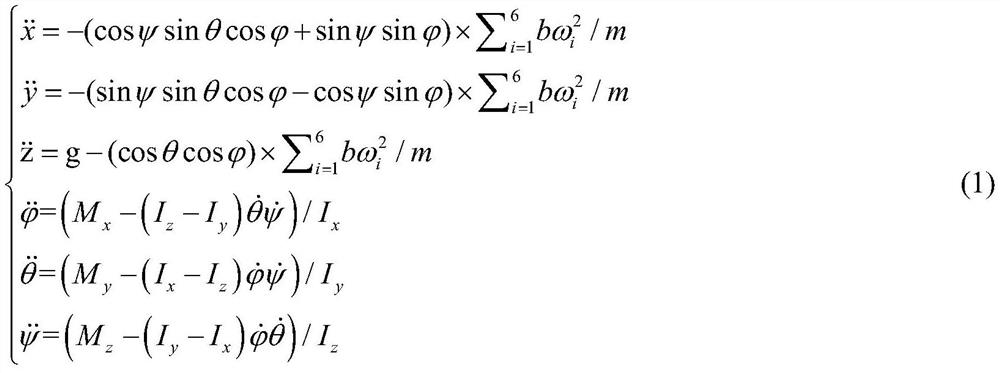
[0054] 1) According to the Newton-Euler method, the nonlinear dynamic model of the six-rotor UAV is established, and its expression is as follows:
[0055]
[0056] In formula (1), x, y and z respectively denote the three-dimensional coordinates of the UAV, θ and ψ represent the roll angle, pitch an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More