

Flexible spacecraft finite time attitude cooperative control method for executing mechanism fault
A technology for flexible spacecraft and actuators, applied in attitude control, control/regulation systems, non-electric variable control, etc., can solve problems such as failures of flexible spacecraft attitude cooperative control, reduce hardware load, and reduce computing resources needs, the effect of enhancing practicality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
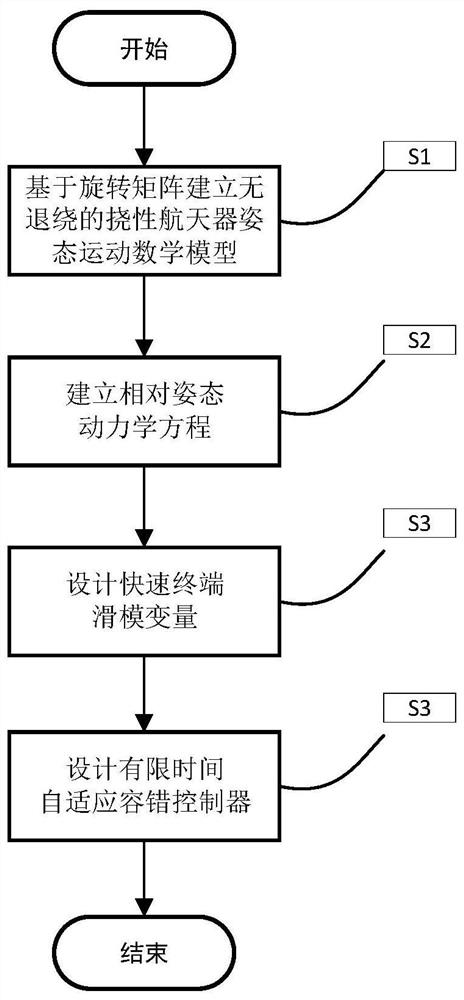
[0074] Such as figure 1 As shown, the flexible spacecraft finite-time attitude cooperative control scheme of the executive mechanism failure designed by the present invention includes the following steps:
[0075] The first step is to establish a non-unwinding flexible spacecraft attitude motion mathematical model based on the rotation matrix. Considering that there are n members in the spacecraft formation system, the following attitude dynamic model can be established for the i-th spacecraft:
[0076]
[0077] In the formula, R i ∈SO(3) represents the rotation matrix of the spacecraft, Its attitude rotation angular rate, positive definite matrix is the inertia matrix, is the coupling matrix between the flexible attachment and the central rigid body in the third mode, are the third-order modal coordinates of the flexible...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More