Hybrid drive heavy load lower limb exoskeleton based on electro-hydrostatic actuation principle and method
An electrostatic hydraulic actuation and hybrid drive technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of limited battery life, large volume, active change, etc., and achieve light and compact structure, high energy utilization rate, The effect of high power density
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] Exemplary embodiments of the present disclosure will be described in more detail below with reference to the accompanying drawings. Although exemplary embodiments of the present disclosure are shown in the drawings, it should be understood that the present disclosure may be embodied in various forms and should not be limited by the embodiments set forth herein. Rather, these embodiments are provided for more thorough understanding of the present disclosure and to fully convey the scope of the present disclosure to those skilled in the art.
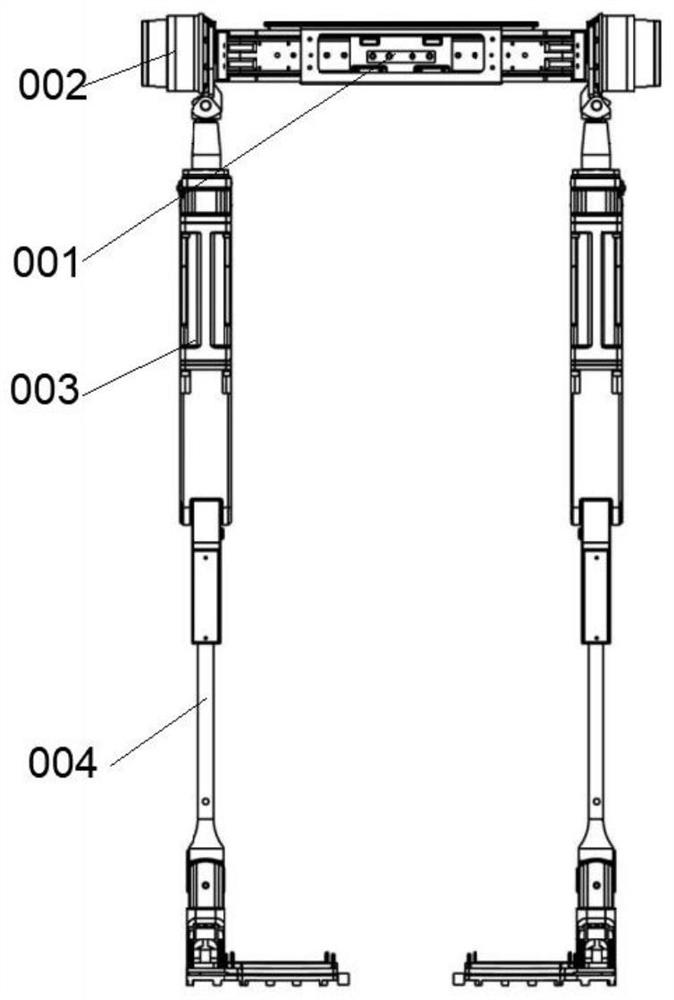
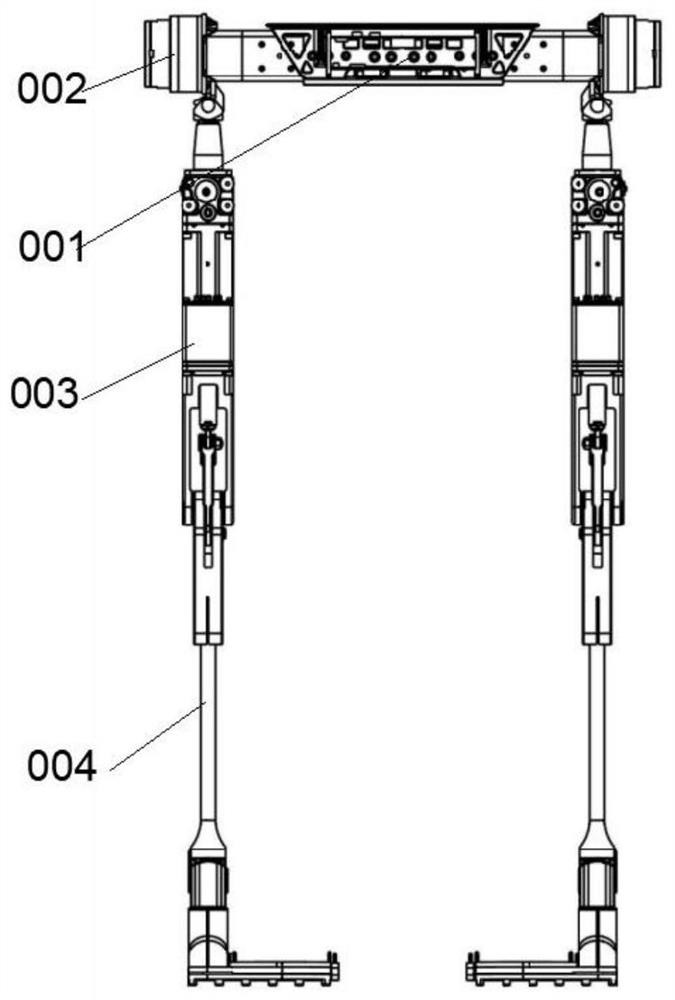
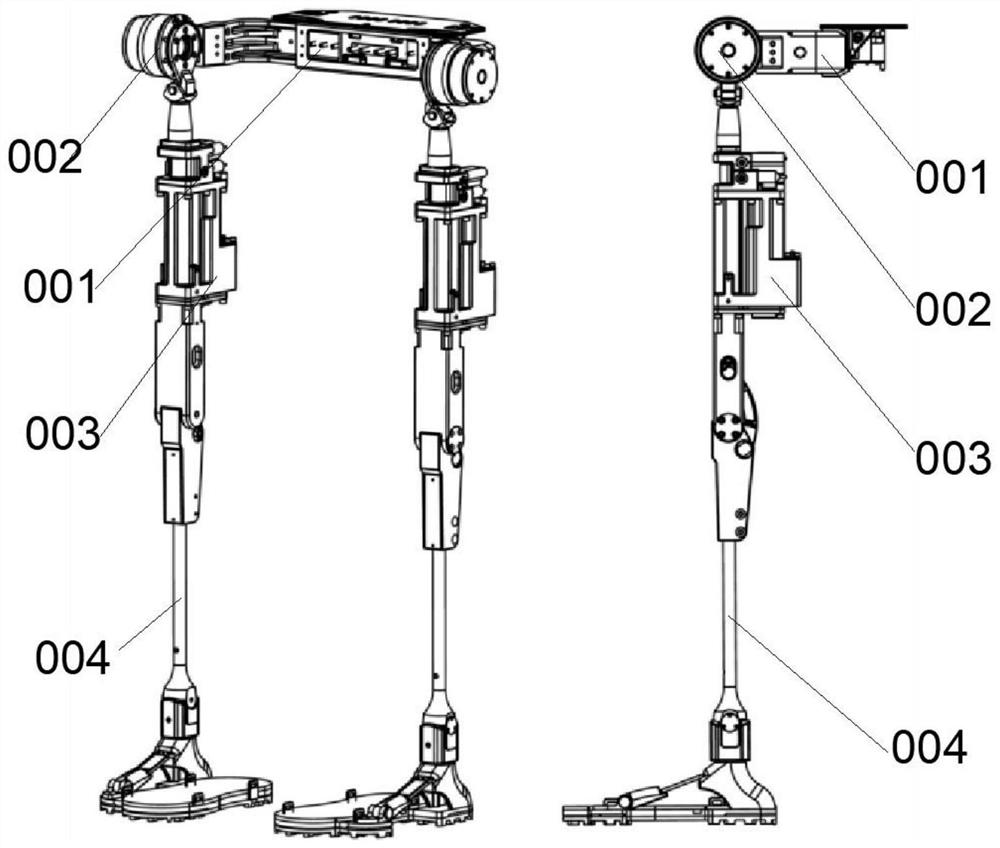
[0060] The present invention provides a hybrid drive heavy-duty lower limb exoskeleton based on the principle of electrohydrostatic actuation, such as figure 1 , figure 2 with image 3 shown. figure 1 For the front view of the heavily loaded lower extremity exoskeleton, figure 2 For the rear view of the heavily loaded lower extremity exoskeleton, image 3 Perspective and side views for the heavily loaded lower extremity exosk...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More