Outdoor robot relocation method based on Go-ICP
A relocation and robot technology, applied in the field of localization, can solve the problems of large global relocation search range, long search time, low efficiency, etc., and achieve the effect of reasonable and reliable search range, reduced search time, and high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
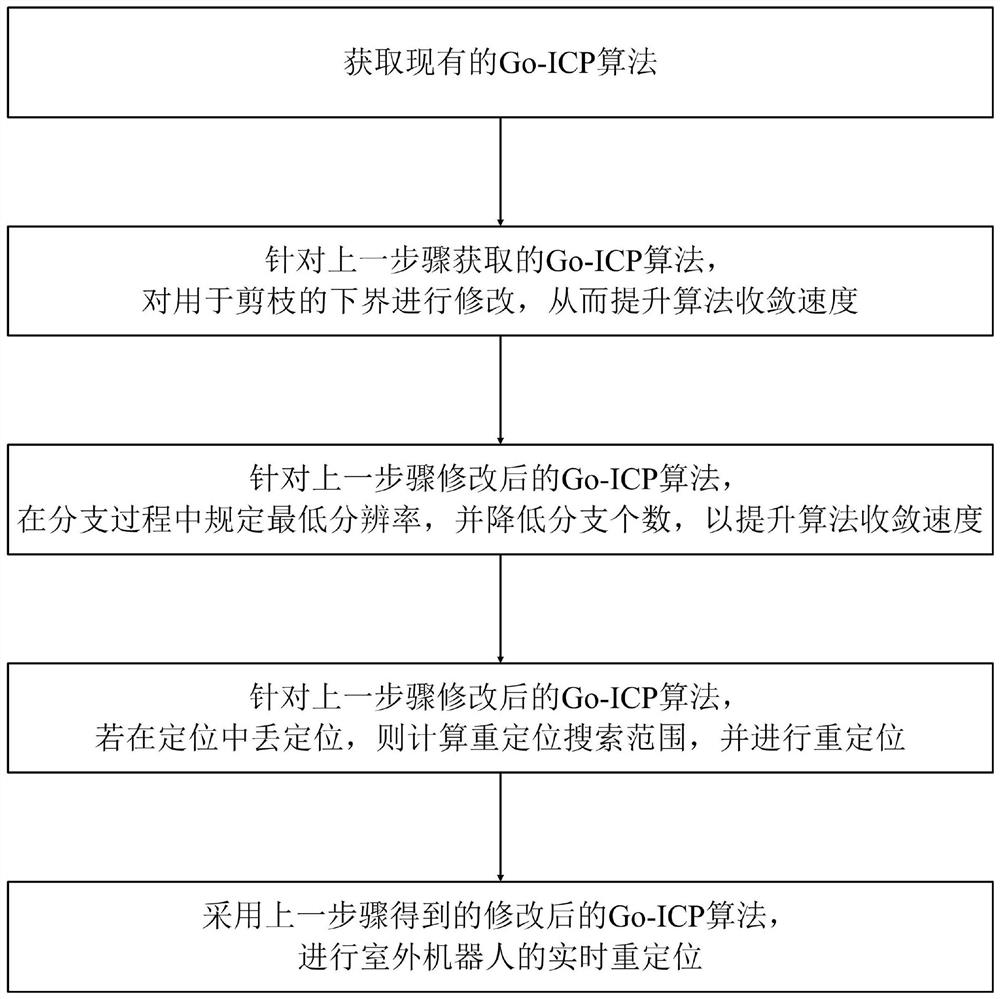
[0069] like figure 1 Shown is the method flow diagram of the method of the present invention: this Go-ICP-based outdoor robot relocation method provided by the present invention comprises the following steps:
[0070] S1. Obtain the existing Go-ICP algorithm;
[0071] S2. For the Go-ICP algorithm obtained in step S1, the lower bound for pruning is modified to improve the convergence speed of the algorithm; specifically, the lower bound for pruning is modified by using the following formula:
[0072]
[0073]
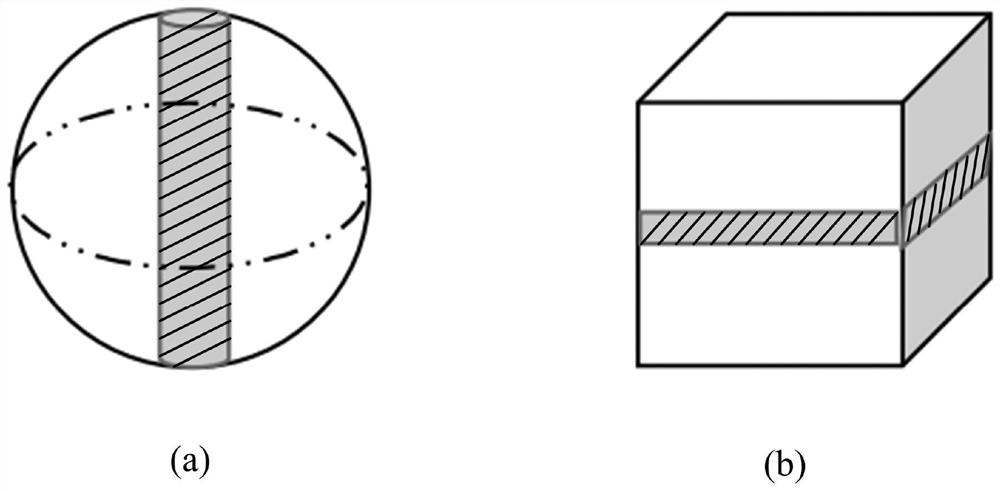
[0074] In the formula is the rotation matrix; x is the point data; is the rotation matrix; σ r Search for the half-side length of the cube for rotation; |||| is the 2 norm; is defined as equal to; Uncertain radius for rotation; t translation; t 0 is the translation search center; σ t half-length of the searched cubic area for X; γ t Undefined radius for translation.
[0075] In the specific implementation, the rotation range changes as figure 2 As sh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com