Strapdown inertial navigation/spectrum red shift autonomous integrated navigation system and filtering method
A technology of integrated navigation system and strapdown inertial navigation, which is applied in the field of autonomous integrated navigation system and filtering, can solve the problems of unable to obtain enough observation information, temporary interruption of measurement signal, and inability to obtain measurement information, etc., to improve navigation positioning accuracy and filtering Calculation accuracy, application of extended space, good concealment effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0133] 1. Mathematical model of SINS / SRS autonomous integrated navigation system
[0134] (1) System state equation
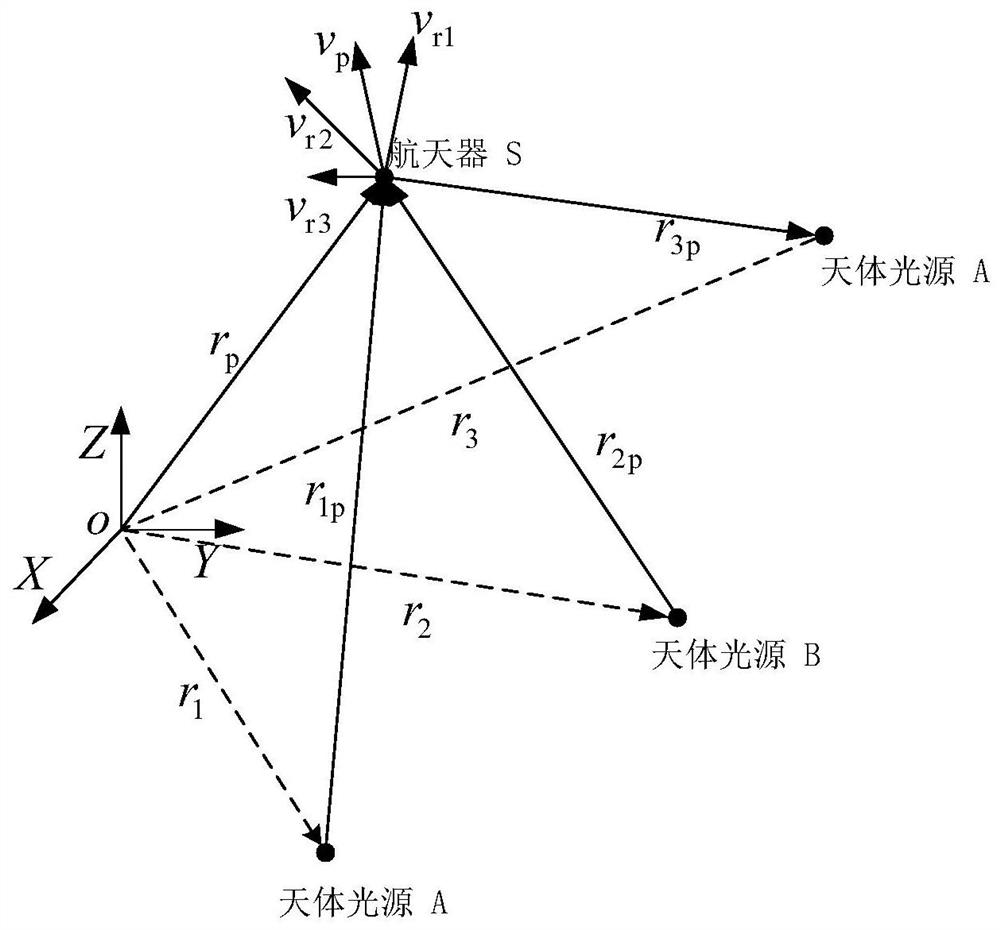
[0135] The East-North-Up geographic coordinate system is selected as the navigation coordinate system, and the system state equation is
[0136]
[0137] In formula (38), X(t) is the system state vector, F(t) is the state transition matrix, G(t) is the noise transition matrix, W(t) is the noise matrix.
[0138]
[0139] In formula (39), the velocity errors in the east, north and sky directions are respectively δv E , δv N , δv U ; The latitude error, longitude error and height error are δL, δλ, δh respectively; the misalignment angle of the mathematical platform is φ E , φ N , φ U ; The constant drift of the gyroscope on the three coordinate axes is ε x , ε y , ε z , and the constant value offsets on the three coordinate axes of the accelerometer are respectively
[0140] The noise transfer matrix G(t) of the system is:
[0141]
[0142] T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More