

Semi-automatic intelligent tennis pick-up robot and control method thereof
A semi-autonomous and robotic technology, applied in the field of intelligent robots, can solve problems such as complex system control methods, failure to avoid people and obstacles, and failure to work smoothly, achieving the effects of high ball storage capacity, cost saving, and cost reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The following is a detailed description of the embodiments of the present invention: this embodiment is implemented on the premise of the technical solution of the present invention, and provides detailed implementation methods and specific operation processes. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention, and these all belong to the protection scope of the present invention.
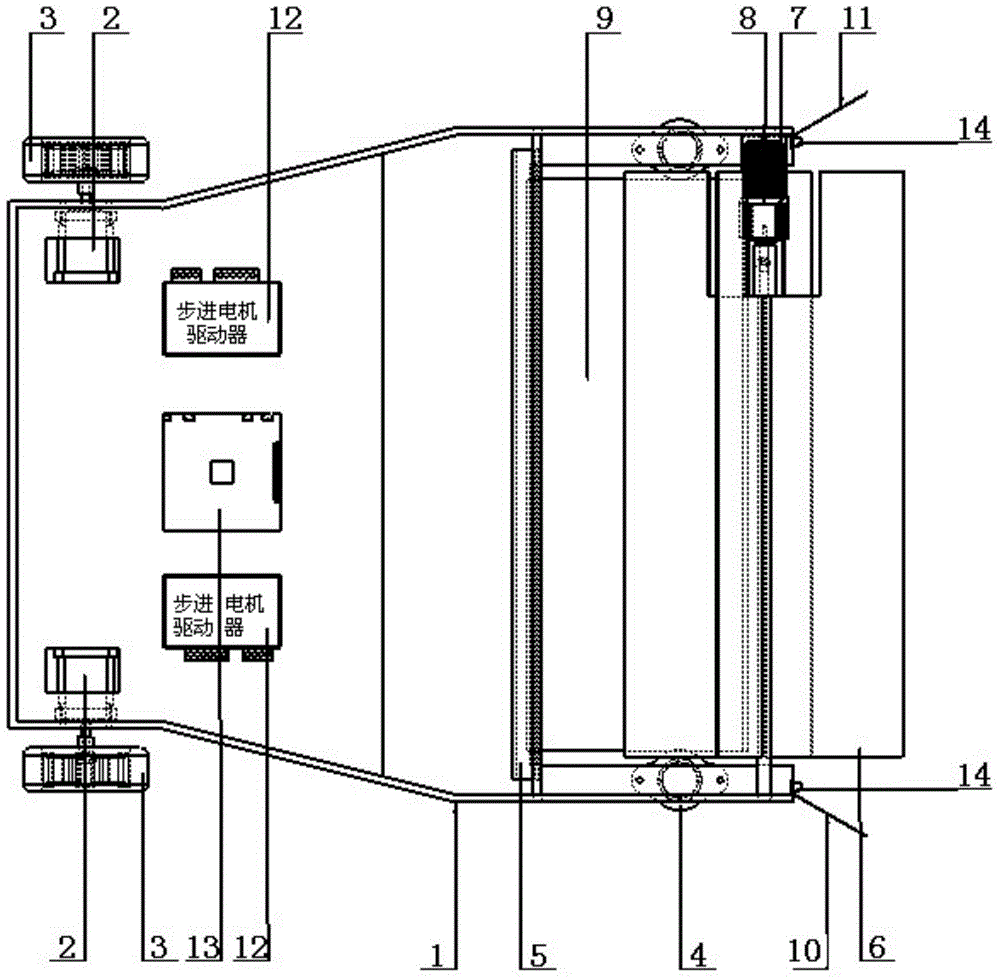
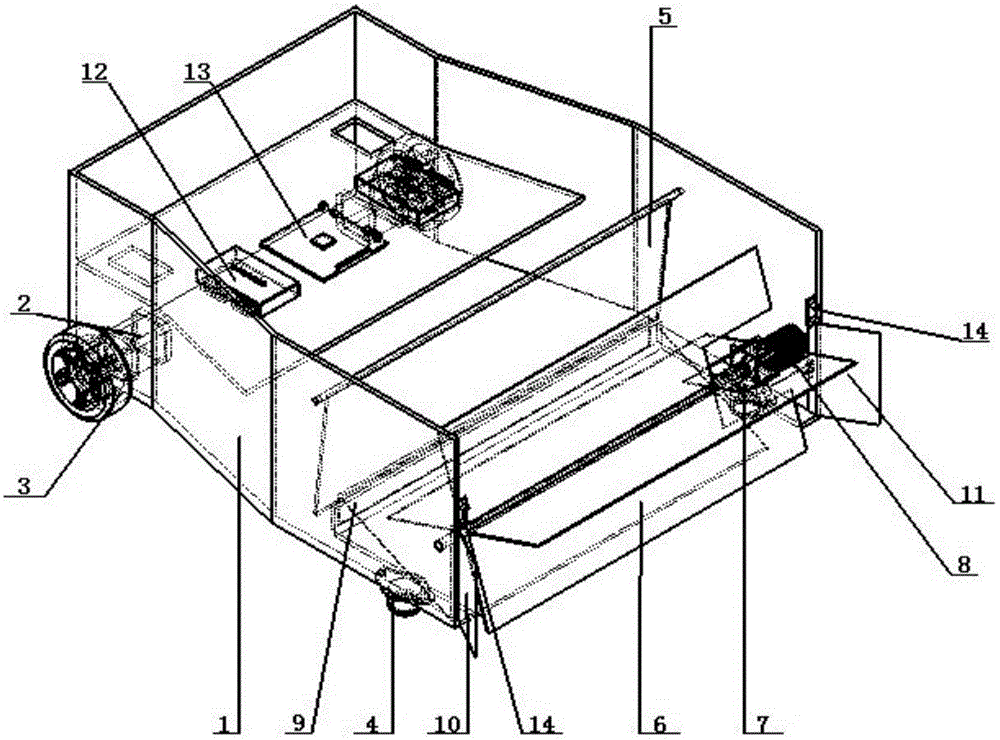
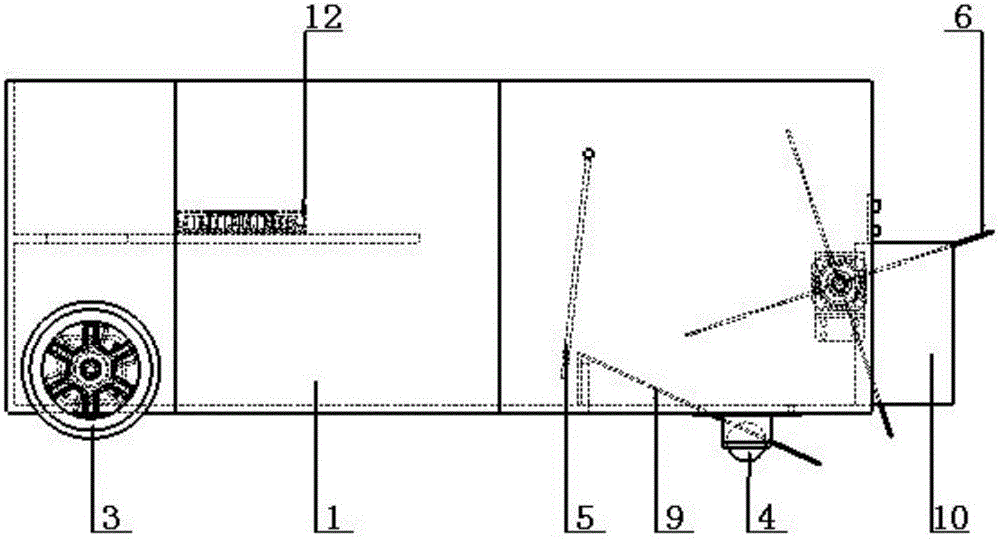
[0026] Please also see Figure 1 to Figure 4 .
[0027] According to one aspect of this embodiment, a semi-autonomous intelligent tennis picking robot is provided, including an information collection system, a control system, a mobile carrier, and a ball picking mechanism. The information collection system is fixed on the mobile carrier and is connected to the control system. connected, the control system is connected with the mobile carrier and the ball-picking mechanism; the ball-pic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More