Improved RRT path planning method based on adaptive resolution octree map
A path planning and resolution technology, applied in two-dimensional position/channel control, vehicle position/route/height control, instruments, etc., can solve problems such as not smooth enough, poor path quality, with edges and corners, and achieve improvement Smoothness, reduced planning time, and improved growth efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0026] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
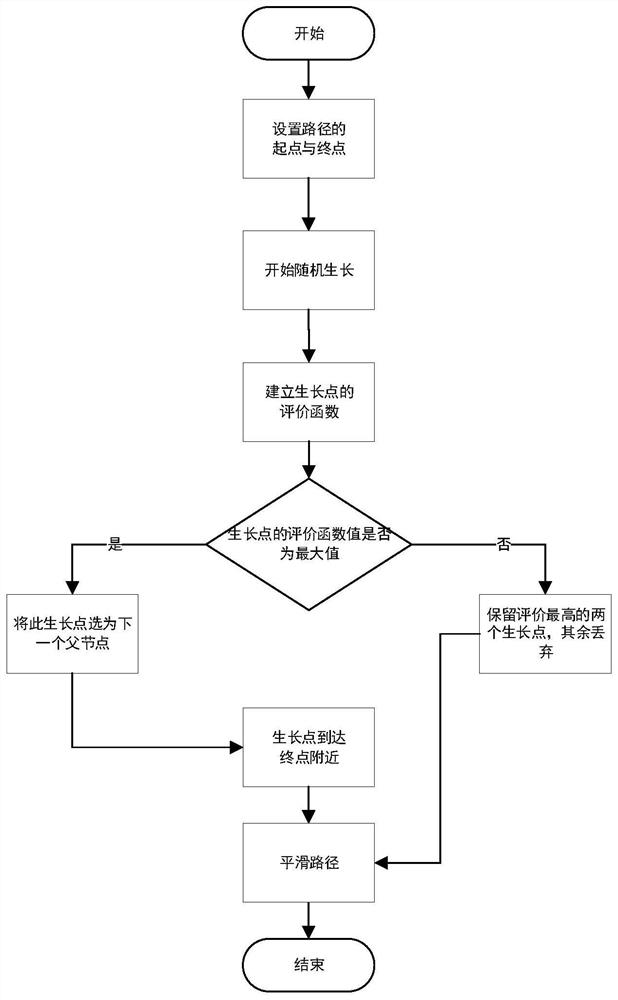
[0027] figure 1 It is the flow chart of the improved RRT path planning method based on adaptive resolution octree proposed by the present invention, and the specific implementation includes the following steps:
[0028] step 1:
[0029] Firstly, an adaptive resolution octree map is built. The octree map is a compressed map that can be updated at any time, which is very suitable for AGV indoor navigation. Each node of the octree map represents a volume element of a cube, and each node has eight child nodes, and the volume elements represented by these eight child nodes are equal to the volume of the parent node. The process of building an octree map is to divide it layer by layer from a root node, and each node divides into eight child nodes until the smallest leaf node. The size of the map represented by the leaf node determines the size of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com