

Obstacle avoidance trajectory planning method for redundant mechanical arm based on improved rapidly-exploring random tree
A technology of trajectory planning and manipulators, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., and can solve problems such as meeting requirements, long calculation time, and difficult path generation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0046] The specific implementation manner of the present invention will be described in detail below in conjunction with the accompanying drawings and preferred embodiments.
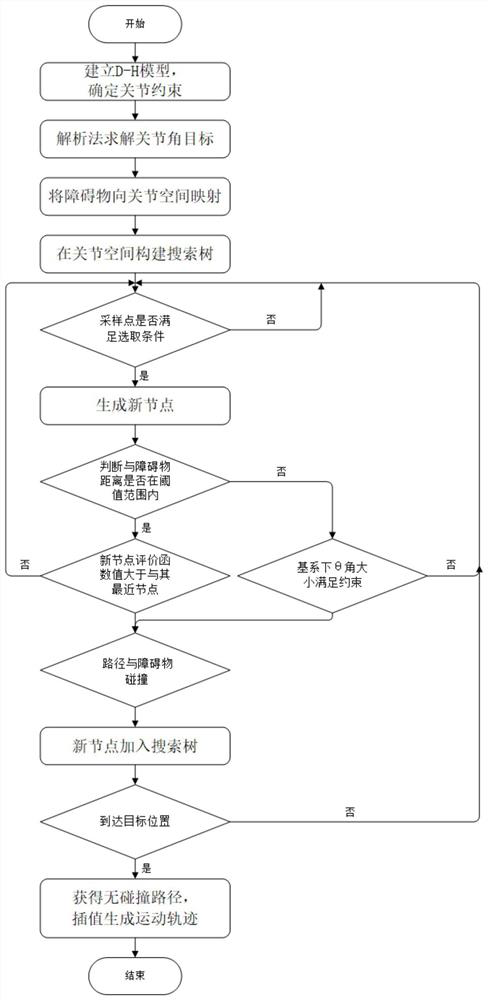
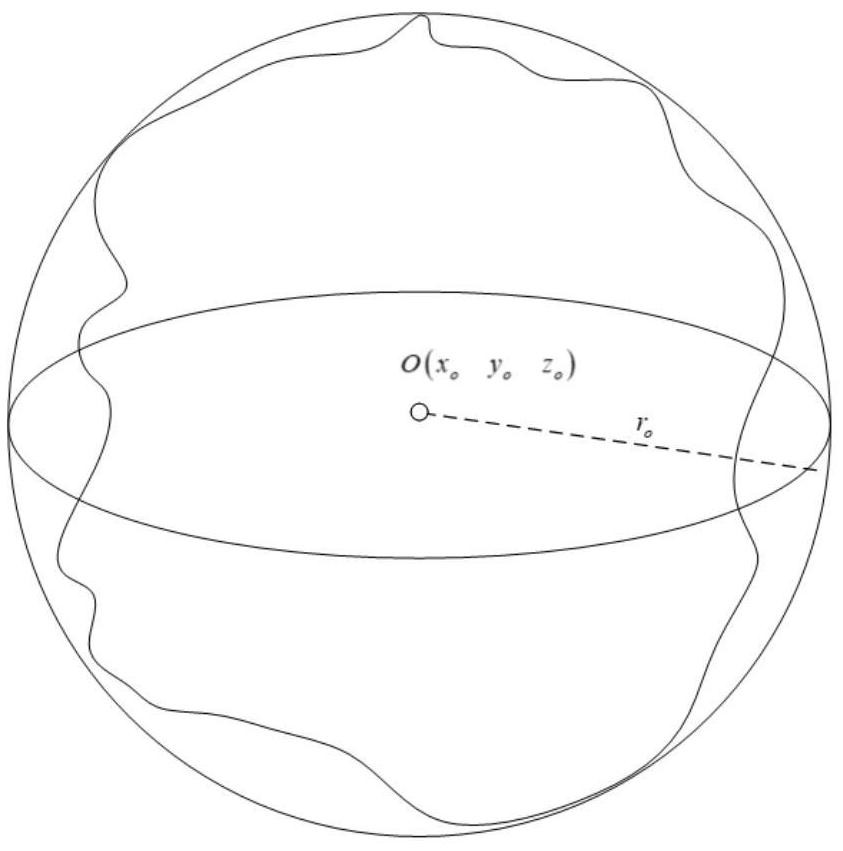
[0047] The present invention provides a redundant robot arm obstacle-avoiding trajectory planning method based on the improved rapid expansion random tree. First, the model of the redundant robot arm and the obstacle is simplified, and the obstacle model is mapped to the joint space of the redundant robot arm. Then improve the random sampling point selection mechanism in the standard RRT algorithm based on the characteristics of the working environment of the redundant manipulator, and optimize the random sampling point selection mechanism to avoid the disadvantage of slow convergence in the standard RRT algorithm caused by the high degree of freedom of the redundant manipulator. Random expansion tree is densely distributed; by introducing an evaluation function to screen the new nodes generated by the ex...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More