

Positioning and attitude determination and point cloud data real-time calculation and fusion method for mobile measurement
A point cloud data and mobile measurement technology, applied in the field of intelligent surveying and mapping, can solve the problems of complex operation process, low efficiency and poor real-time performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
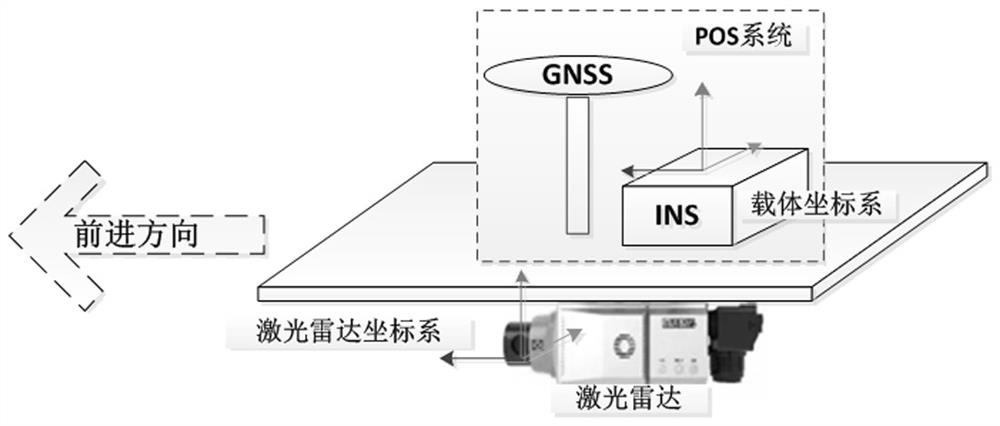
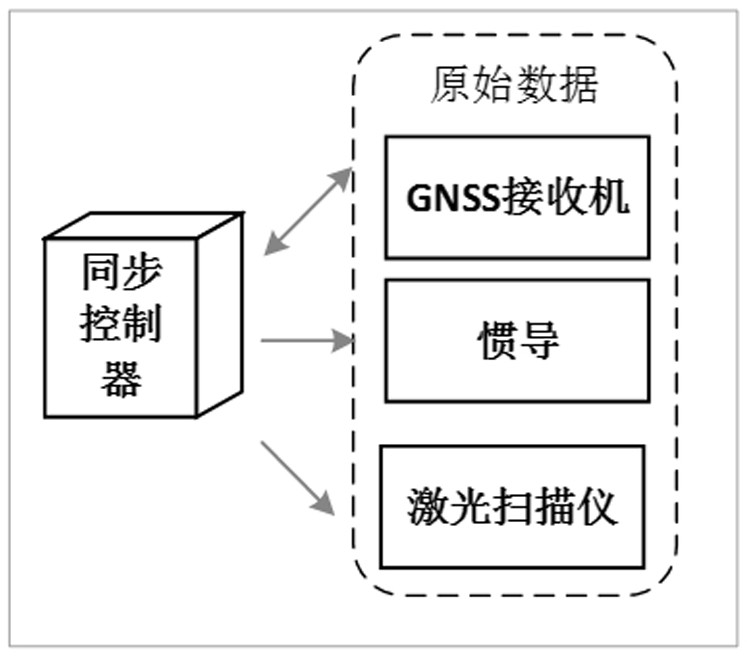
[0035] Such as figure 2 , 3 As shown, the mobile measurement system of the embodiment includes a GNSS receiver, an inertial navigation module and a laser scanner, and a position and orientation system (POS) is composed of the GNSS receiver and the inertial navigation module. The mobile measurement process adopts the carrier coordinate system. The origin of the inertial navigation coordinate system is used as the origin of the carrier coordinate system. The forward direction of the carrier is the positive direction of the Y axis, the right direction is the positive direction of the X axis, and the upward direction is the positive direction of the Z axis.
[0036] The world coordinate system of the embodiment is defined as follows: with the WGS-84 ellipsoid or CGCS2000 as the benchmark, set the central meridian according to the local longitude for projection such as Gauss projection or transverse Mercator projection, plus the local elevation system to form a plane A three-dime...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More