Navigation and positioning method for dental implant robot
A technology for navigation and positioning and dental implants, applied in dental implants, surgical navigation systems, dentistry, etc., can solve problems affecting surgical results and fatigue, and achieve the effects of reducing work intensity, easy operation, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] In order to make the technical problems, technical solutions and beneficial effects solved by the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
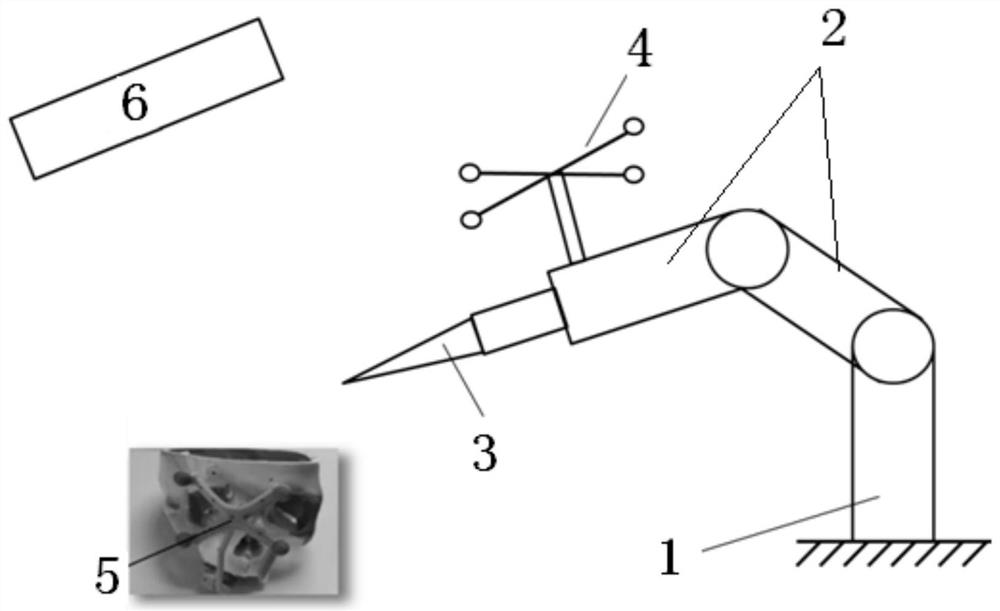
[0063] The invention provides a navigation and positioning method for a dental implant robot. Compared with the manual operation of a doctor, the mechanical arm has the advantages of accurate positioning, small vibration, and stable work, which can reduce the doctor's work intensity and ensure the accuracy of the operation. The arm drives the surgical knife to achieve precise surgery.
[0064] refer to figure 1 , a navigation and positioning method for a dental implant robot provided by the present invention is a navigation and positioning method for a dental implant ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More